
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 1, 2018
El estudio de la estructura ósea del pie resulta de gran interés en diferentes áreas de investigación y enseñanza. Desde el punto de vista académico, el uso de software (CAD/CAM/CAE) como Matlab® y SolidWorks® permite diseñar prótesis y órtesis siendo completamente funcionales, estas herramientas mejoran la percepción y el entendimiento del movimiento del pie. En un simulador se utiliza el método sistémico para modelar el objeto, generar la matemática necesaria, describir el comportamiento del pie y evaluar el sistema a través de una interfaz gráfica tridimensional aumentando el conocimiento e innovación en las diferentes áreas del conocimiento.
Palabras Clave: SolidWorks, Matlab, CAD
The study of the skeletal structure of the foot is of significant interest in different research and teaching areas. From the academic point of view, the use of software (CAD/ CAM / CAE) such as Matlab® and SolidWorks®, allows the design of prostheses and orthoses being fully functional, these tools increase the perception and understanding of the foot movement. In a simulator, the systemic method is used to model the object, generate the necessary mathematics, describe the behavior of the foot and evaluate the system through a three-dimensional graphic interface, increasing knowledge and innovation in the different areas of knowledge.
Key words: SolidWorks, Matlab, CAD
En el área de la salud se define a una articulación como la unión de dos huesos, mientras que en el área de la robótica se considera que es la unión material de dos o más piezas de modo que por lo menos una de ellas mantenga alguna libertad de movimiento del cuerpo y su correlación con respecto al tronco. El pie es un órgano complejo que realiza diversas funciones primordiales tales como el soporte de la postura humana. El pie ayudado por músculos, tendones y otros huesos impide que el cuerpo humano caiga.
Existen cinco posturas principales que el cuerpo humano puede realizar; clinoposición (tumbados, echados o tendido sobre la espalda o boca arriba o la posición del cuerpo cuando está tendido sobre uno de sus lados), Ortostatismo u ortógrada (de pie o vertical), sedestación (cuando el cuerpo está sentado), cuclillas y arrodillado (Ver Figura 1). De especial interés la postura ortógrada, ya que en la robótica describe la acción de caminar o estar de pie con el cuerpo en posición vertical, representando un gran reto de diseño y fabricación.
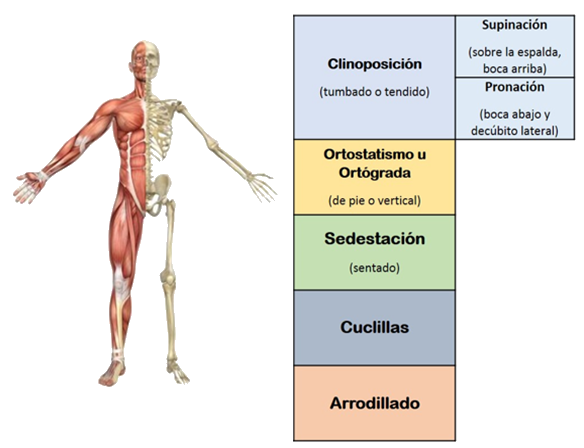
Figura 1. Posturas del cuerpo humano
Los trabajos realizados en la década de los 70’s y los 80’s con respecto a la extremidad inferior ha fungido un papel importante para el avance en conocimiento médico y tecnológico, más sin embargo, ha sido desestimada la estructura ósea del pie, sabiendo que de ahí se parte para la propia marcha, las funciones de sostén, propulsión, recepción y amortiguación, dando lugar a que se realicen prótesis y órtesis estructuralmente estorbosas o de deficiente funcionalidad y en robótica dando lado a diseños que son conformados por placas de una sola segmentación o en su defecto sustituyéndolo por ruedas.
En el desarrollo de simuladores enfocados en el pie humano, éste se ha considerado como un órgano de simple bosquejo, no obstante se conoce médicamente que el pie es un órgano fundamental y complejo que posee numerosas funciones como el sostén (estos son proveídos por las articulaciones y los tendones), la propulsión, la recepción (por sus tejidos internos y externos) y la amortiguación, con la función elemental de proporcionar las condiciones necesarias para poder mantener el equilibrio del cuerpo en relación con el suelo.
Hasta el momento el estudio del movimiento del pie humano, usando simuladores, ha sido bastante básico, ya que el pie se ha considerado como un sistema simple de piezas planas. Actualmente, las áreas interesadas en el estudio del movimiento del pie humano han aumentado, tales como el ámbito industrial, la tecnología y en el área médica. En el área de robótica y bioingeniería, el interés por realizar un estudio más detallado del pie humano se debe al interés por proporcionarle a los robots la capacidad de caminar de forma más natural o similar al del ser humano, y en el área médica la creación de una prótesis funcional y más accesible económicamente, así como en el área de enseñanza la manipulación y entendimiento del cuerpo humano sin necesidad de dañar equipo costoso.
Desde el punto de vista clínico, la marcha normal presenta cinco características imperceptibles pero presentes si se estudia con detenimiento; uno: Estabilidad (de todo el cuerpo) durante el apoyo, dos: Paso libre del pie durante el balanceo, tres: Preparación adecuada del pie para el contacto inicial con el suelo o superficie, cuatro: Longitud adecuada del paso, que también se relaciona con la estatura del individuo, cinco: Energía utilizada al caminar, es decir la conservación de la energía. [3]
El ciclo de marcha se divide en dos fases principales: Fase de apoyo y Fase de balanceo, que son importantes para originar el avance o retroceso y que al final se resumen en puntos de apoyo o presión del pie mostrándose en la Figura 2. De acuerdo a la anatomía del pie, es posible generar rápidamente la aceleración, oscilación intermedia y desaceleración, sin embargo, depende de la edad, la fatiga o el dolor. Morfológicamente la descripción de la bóveda plantar se basa en la existencia de arcos óseos de diferente elevación respecto del suelo durante el apoyo, originando la clasificación de los pies: cavo, normales y planos (o convexo de este último). [5]
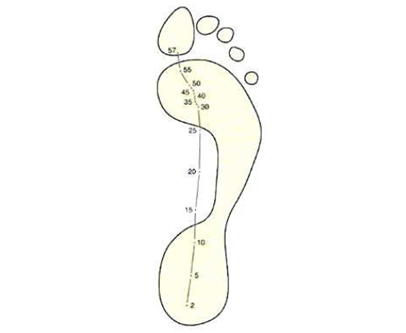
Figura 2. Puntos de presión al realizar la caminata
El pie y el tobillo son puntos focales en los que se transmite el peso durante la marcha. Los acojinamientos gruesos del talón y dedos actúan como amortiguadores en los actos de mar-cha y carrera, las articulaciones están capacitadas para efectuar los ajustes necesarios para el equilibrio fino sobre diversos terrenos. Así pues, el pie está compuesto de muchos huesos que fungen un papel importante para la movilidad del pie (Ver Figura 3), seccionándose coloquialmente en dedos del pie (comprendido por todas las falanges), la planta del pie (comprendida por todos los metatarsianos) y el talón (comprendido por todos los huesos restantes).[4]
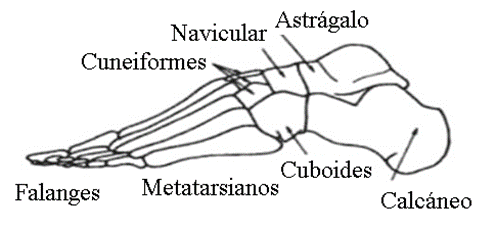
Figura 3. Estructura ósea del pie
Desde el punto de vista de control, un sistema para que cumpla una tarea debe de estar en un lazo de retroalimentación. Ver Figura 4. El bloque de “Control” brinda la información necesaria para que el bloque “Sistema” cumpla con la tarea asignada, mientras que “x” como entrada e “y” como salida (movimiento o acción generada resultante). [1]
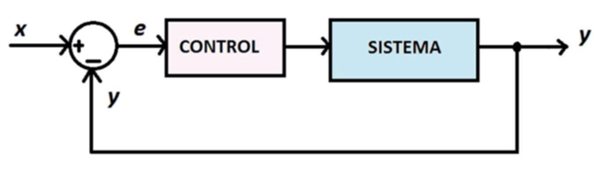
Figura 4. Sistema en lazo cerrado
En este caso el bloque “Control” describe una estructura PD, es decir Proporcional y Derivativo (PD) usada para cumplir con la tarea asignada que es “regulación”, también conocida como control de posición. Mientras que el bloque “Sistema” representa el pie. [2]
Para realizar un simulador, desde el punto de vista de diseño, se requieren cumplir con tres pasos importantes: 1) modelado matemático del sistema, 2) dibujo del sistema usando herramientas CAD y 3) programación del sistema.
1) Modelado matemático del sistema: Este paso consiste en caracterizar el comportamiento del sistema usando leyes físicas y mecánicas, que permitan obtener la representación matemática del sistema, la cual se capaz de describir el comportamiento de dicho sistema a cualquier estímulo, sea este interno o externo. La metodología usada para obtener el modelo matemático es la “Metodología de Euler-Lagrange”, la cual consiste en: a) obtener la cinemática directa del sistema (posición), b) calcular la velocidad, c) obtener la rapidez, es decir la velocidad al cuadrado, d) hallar las energías cinética y potencial, e) evaluar el Lagrangiano ![]() , el cual se define como la diferencia entre la energía cinética y la potencial, y finalmente f) evaluar el Lagrangiano en la ecuación de Euler-Lagrange, la cual se define como
, el cual se define como la diferencia entre la energía cinética y la potencial, y finalmente f) evaluar el Lagrangiano en la ecuación de Euler-Lagrange, la cual se define como
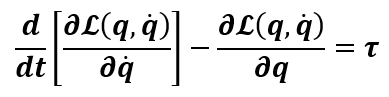
donde τ es el par aplicado, el cual es equivale al voltaje aplicado, siendo necesario para el funcionamiento del sistema. El resultado obtenido de resolver (1) se conoce como modelo dinámico del sistema y está definido como:
siendo M(q) la matriz de inercia, que se encuentra intrínsicamente relacionada con la energía cinética, la matriz Centrífuga y de Coriolis C(q,q ̇ ) (necesaria para establecer la estabilidad del sistema) y el vector de gravedad g(q).
El par aplicado τ es el control PD, cuya principal función es garantizar que el sistema en lazo cerrado cumpla con la tarea asignada. El control PD está definido como:
donde ![]() y
y ![]() son la ganancia proporcional y deri-vativa, respectivamente. La ley de control y el sistema deben de ser analizados usando la teoría de Lyapunov con el objetivo de comprobar estabilidad. [1]
son la ganancia proporcional y deri-vativa, respectivamente. La ley de control y el sistema deben de ser analizados usando la teoría de Lyapunov con el objetivo de comprobar estabilidad. [1]
2) Dibujo del sistema usando herramientas CAD: Para la creación de cualquier objeto previamente se realiza un esbozo, plano o simulación (CAD) (ejemplo Figura 5), esto es con diferentes clases de simuladores, uno en particular conocido simplemente como simulador (comprende aquellos que se realizan físicamente o están acompañados de algún control o volante para su manejo) y en el ámbito académico como simulador digital o simulador por computadora (comprende aquella herramienta computacional con la cual se modifican parámetros específicos o características específicas de los objetos que se están diseñando o utilizando.)
Ahora bien, un simulador permite emular el comportamiento de un sistema, bajo el mando de un controlador, e informar por medio de una plataforma gráfica, todas las posibles variables que podemos encontrar en un sistema real, de la manera más cercana posible a la máquina que se simula, en robótica y control reproduce artificialmente un fenómeno o las relaciones entrada-salida de un sistema, siendo que los simuladores reproducen sensaciones y experiencias que en la realidad pueden llegar a suceder convirtiéndose en una amplia gama de aplicaciones y usos. Con el uso de Matlab® a través de Simulink® permite diseñar sistemas dinámicos sencillos o complejos y realizar modelado y simulación, así pues, la manipulación de la simulación en SolidWorks® se hace a través de Matlab.
3) Programación del sistema: es el uso de un lenguaje de programación que relacione el dibujo 3D realizado con software CAD y las ecuaciones matemáticas que describen el sistema a través de un método de análisis numérico, como el “Método de Runge-Kutta 5”. Los métodos numéricos permiten resolver las ecuaciones dinámicas del sistema, para después
La manipulación de la estructura inferior del cuerpo humano sin dañar al paciente posibilita una mejor comprensión estructural y de desarrollo, variando parámetros fáciles de introducir y prácticos de visualizar, que a partir de una estructura en dos dimensiones se transforma en tres dimensiones y a su vez permite la creación de la prótesis seccionados para su manipulación a través de Matlab®.
El dibujo tridimensional o 3D se realiza con software CAD, el cual permite obtener una representación realista del sistema (Figura 5). El software usado en este trabajo es SolidWorks®.
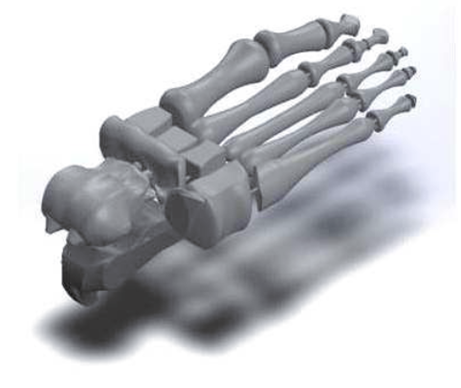
Figura 5. Modelo de un pie usando SolidWorks®
El pie de acuerdo a los puntos de presión se forma en bloques para facilitar su manejo, ya sea en el ámbito académico o en el médico, sin dejar a un lado la propia morfología del pie, es decir, contemplando la bóveda plantar característica del pie.
En la Figura 6 se observa en color los bloques por los cuales se seccionó al pie, así como también sus componentes ya dibujados en SolidWorks®.
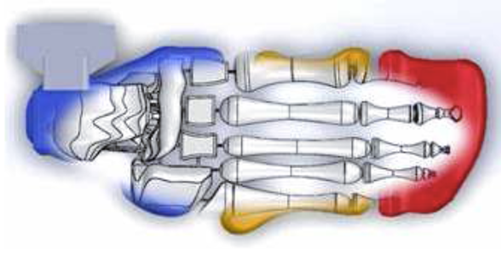
Figura 6. Diseño del pie seccionándola a bloques
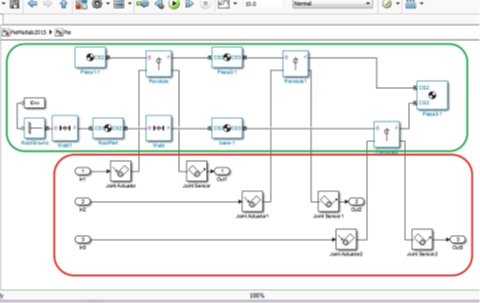
Figura 7. Sistema del pie en Simulink® de Matlab®
La relación entre los programas se usa con el Toolbox sim-mechanics® de Matlab®.
Haciendo uso de la estructura del sistema, se agrega el control Proporcional Derivativo mismo que cumple la función de poder ser manipulable, de acuerdo a los requerimientos necesarios para el funcionamiento del mismo y continuando con el uso de Matlab®, se visua-liza el comportamiento del sistema en lazo cerrado en la salida que representa un voltaje de acuerdo a los conceptos teóricos, de igual forma en gráficas que representan cada sección y la visualización del comportamiento real del sistema manipulando los parámetros. Depen-diendo de la posición en la que se encuentre se elige el movimiento para iniciar la cadencia hacia adelante o hacia atrás considerando la estabilidad del sistema. Ver Figura 8.
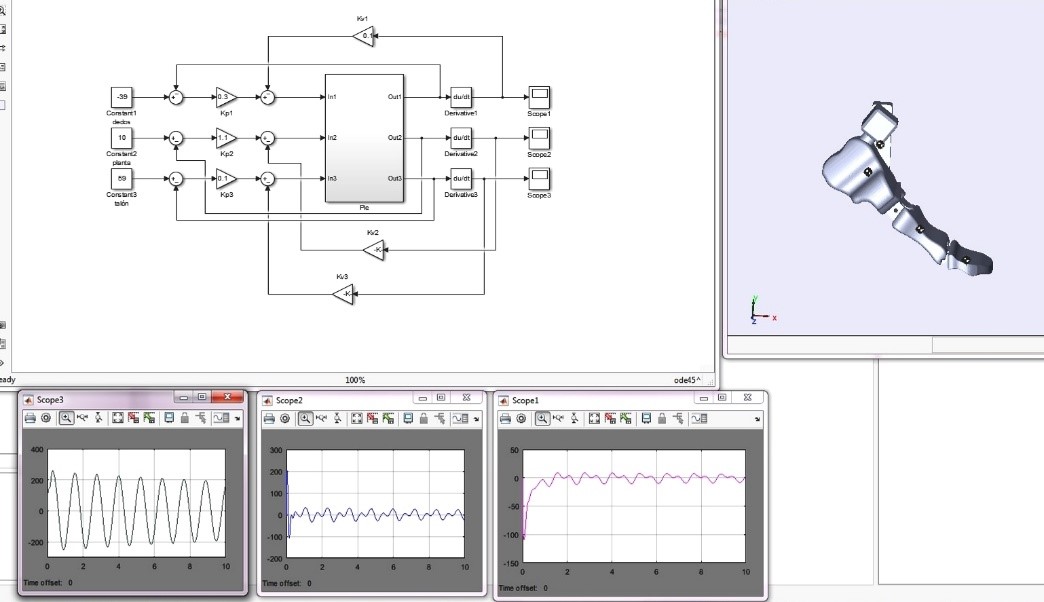
Figura 8. Control y representación de todo el sistema en lazo cerrado
Así pues, se corrobora en las gráficas los puntos de mayor presión procedentes de la fuerza vertical que ejerce el peso corporal fungiendo como mecedoras presentes al momento de iniciar la caminata (Ver Figura 9), soliendo ser casi imperceptibles al ojo humano pero im-portantes cuando se inicia la cadencia y la naturalidad de los movimientos sin afectar estruc-turas superiores.
Los valores permitidos para generar movimiento en el sistema dependen del usuario consi-derando los grados de amplitud que puede alcanzar una extremidad inferior, sin embargo, no representa una limitante en los valores que puede adquirir cada variable.
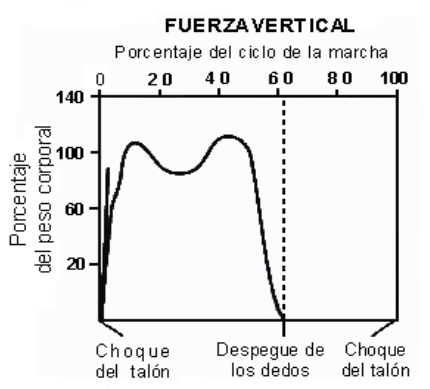
Figura 9. Reacción del suelo a la marcha
Se ha desarrollado un simulador para estudiar el comportamiento de la estructura ósea del pie modelándolo como un sistema de control en lazo cerrado. En este sistema se introduce un controlador proporcional derivativo que permite reproducir y visualizar el movimiento del pie en condiciones iniciales normales de cadencia. El presente simulador contribuye al conocimiento e innovación de estructuras que actualmente se usan en medicina y robótica, permitiendo ser manipuladas sin necesidad de dañar equipo costoso y con la posibilidad de consolidarse en una prótesis u órtesis de apoyo a personas con capacidades especiales, ampliando las aplicaciones en los diferentes niveles educativos y de tecnología.