
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 1, 2018
Hoy en día se comercializan prótesis infantiles de alta calidad, no obstante, estas presentan periodos de uso reducidos (8 a 14 meses) por el rápido crecimiento de los pacientes infantiles, poca adaptabilidad y elevados precios que las vuelven poco accesibles para la mayoría de la población. La propuesta es el desarrollo de prótesis a menor costo gracias a los nuevos materiales y nuevas técnicas de implementación, como es la impresión 3D en específico, además de agregar una propiedad de ensamblaje para volverla útil por más tiempo, reducción el tiempo de reinversión.
Palabras clave: Prótesis, bajo costo, adaptable
Nowadays are sell high quality kid’s prosthesis, but those has a short useful period (8-14 months) because of fast grown of the patients, low adaptability and high price doing unaffordable for most the people.Our proposal is about the development of a lower price prosthesis with new materials and new implementing techniques, as the 3D printing, and adding a puzzle property to increase the useful time and to reduce the reinvestment time.
KEYWORDS: Prosthesis, low cost, adaptable
En este trabajo queremos abordar un problema en específico, la complicación en el desarrollo físico y emocional de un niño por una patología que le haya causado la pérdida de una extremidad, en específico de la pierna. Lo que nos lleva a plantearnos gran parte de los problemas que puede llegar a sufrir un niño por su falta de extremidad.
De por sí es común que algunos niños lleguen a sufrir de alguna clase de desadaptación social por alguna anomalía, bulling como suelen decirle, en estos casos se presenta en un grado mayor no sólo por no parecer “Normal”, también por no poder realizar las actividades que la mayoría de los niños realizan, por no poder pertenecer a los grupos de niños que realizan actividades físicas [1].
Todo esto provoca en los niños un alto índice de inseguridad, una alta dependencia hacía algún familiar, etc. Y esto si bien no puede ser solucionado en su totalidad, todavía, por un aditamento lo que proponemos es otorgar un nuevo “juguete”, algo que en vez de remarcar esta anomalía como una deficiencia le otorgue al niño un extra social, algo que lo remarque con un símbolo de superioridad que sirva de complemento, además de que se busca que esto llegue a una mayor cantidad de niños, no sólo a aquellos privilegiados, queremos equiparar las circunstancias de los niños para poder darles más herramientas de desempeño e inserción social y reducir esta disparidad social, atacando la parte económica, social, psicológica y física de estos niños [2].
Actualmente contamos con diversos diseños para una prótesis de extremidades inferiores. La mayoría son a base de metales pesados y estructuras geométricas básicas, pero son de materiales costosos además de que no permiten mucha diversidad, por lo que proponemos el uso de la tecnología de impresión 3D para ofrecer más versatilidad, ya que esta nos permite hacer diversas modificaciones reduciendo la complejidad.
Una impresora 3D consiste en un extrusor, es un sistema capaz de calentar el hilo del material a imprimir, por lo regular plásticos, a la temperatura adecuada e ir colocando gotas de este material en las coordenadas tridimensionales adecuadas. Esta tecnología nos permite hacer diseños más complejos y de diferentes figuras geométricas irregulares reduciendo el desperdicio del material y las limitantes de maquinar un material con diferentes cortadores, herramientas, etc. Este nos permite a su vez usar otra variedad de materiales, con diferentes propiedades, en su mayoría una mayor variedad de plásticos.
Dentro de los nuevos diseños tenemos que tener en cuenta una variedad de factores, empezando por el tipo de diseño, la geometría correcta para los esfuerzos y para la estética del diseño, propiedades del material a usar (Dureza, Flexibilidad, elasticidad, etc.) y las limitantes que pueda tener la técnica que usaremos para que el material elegido se transformará en el diseño elegido.
Dentro de la parte experimental primero se realizaron las medidas de nuestro paciente. Como se muestran en la tabla 1:
Tabla 1. Medidas tomadas en cuenta para la realización de la prótesis
| Parámetros | Niño |
|---|---|
| Estatura | 1.08 m |
| Peso | 22 Kg |
| Medida de Talón a Rodilla Pierna derecha | 28.8 cm |
| Medida de Talón a Amputación Pierna Izquierda | 22.2 cm |
| Medida de talón a centro de tobillo Pierna derecha | 3.8 cm |
| Diámetro menor pierna derecha | 36cm |
| Diámetro amputación Pierna Derecha | 54 cm |
| Diámetro de tobillo Pierna derecha | 47 cm |
| Medida de Planta de Pie | 16.2 cm |
Estas medidas fueron acompañadas con una réplica realizada del muñón del niño, con un molde a base de alginato (Este material es el usado por dentistas para los moldes de las placas dentales) para ser amigable con el paciente. En la figura 1 se muestra cómo se encuentra el paciente y como se realizaron las medidas.

Figura 1. Muestra de las medidas tomadas al paciente
Además de que estas medidas son a base de la comparación con la pierna existente. Con las medidas adecuadas se realizaron los primeros diseños teniendo en cuenta que se utilizaría una impresora 3D, por lo que se decidió intentar ocupar las curvas naturales de la pantorrilla para amortiguar los esfuerzos, por lo que se intentó replicar una pierna izquierda. Se realizaron las comparaciones con los materiales disponibles, para saber cuáles eran las propiedades adecuadas para nuestro diseño, además de realizar diferentes análisis de esfuerzos por software con los materiales propuestos, usando las propiedades mecánicas obtenidas de sus hojas de especificaciones. Se muestran en la tabla 2.
Tabla 2. Propiedades mecánicas de diferentes materiales propuestos
| Densidad | Dureza | Resistencia a la tracción | Módulo de Flexión | |
|---|---|---|---|---|
| PETG | 1.27 g/cm3 | 101 MPa | 73 MPa | 2200 MPa |
| PLA | 1.24 g/cm3 | 28.1 MPa | 145 MPa | 1879 MPa |
| ABS | 1.04 g/cm3 | 94 MPa | 32 MPa | 1900 MPa |

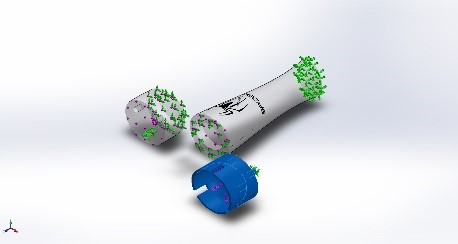
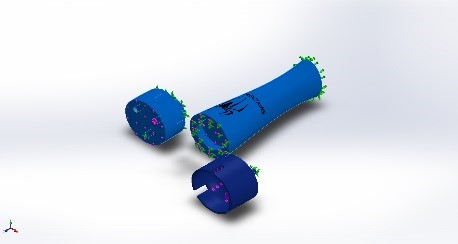
Figura 2. Diseño de la prótesis
En la figura 2 mostramos como es el diseño de la prótesis, esto se hizo gracias a SolidWorks, es un diseño que está dividido en 3 partes las cuales son embonadas y nos permite ir cambiándolas conforme el paciente vaya creciendo.
En la Tabla 3 se muestra una comparación que hicimos sobre las propiedades mecánicas de los materiales que pueden ser utilizados para hacer la prótesis.
Tabla 3. Comparativa de las propiedades mecánicas
| Sólidos | |||
| Nombre de documento y referencia | Tratado como | Propiedades volumétricas | Ruta al documento/Fecha de modificación |
MatrizC1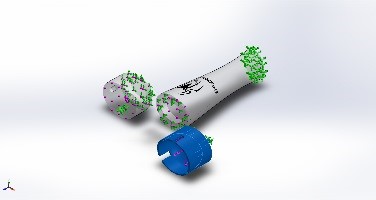 |
Sólido | Masa:0.0393512 kg Volumen:3.27923e-005 m^3 Densidad:1200.01 kg/m^3 Peso:0.385642 N |
C:\Users\equipo\Documents\respaldo\Mecatronica\protesis\Muñon.SLDPRT Dec 03 23:40:36 2017 |
Cortar-Extruir7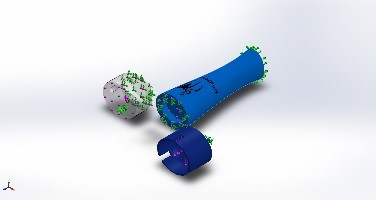 |
Sólido | Masa:0.209027 kg Volumen:0.000195362 m^3 Densidad:1069.95 kg/m^3 Peso:2.04847 N |
C:\Users\equipo\Documents\respaldo\Mecatronica\protesis\pantorrilla.SLDPRT Dec 03 23:40:35 2017 |
Saliente-Extruir2 |
Sólido | Masa:0.0860331 kg Volumen:8.04076e-005 m^3 Densidad:1069.96 kg/m^3 Peso:0.843124 N |
C:\Users\equipo\Documents\respaldo\Mecatronica\protesis\socket.SLDPRT Dec 03 23:40:36 2017 |
Tabla 4. Características del material de la prótesis
| Referencia de modelo | Propiedades | Componentes | |
 |
Nombre: Tipo de modelo: Criterio de error predeterminado: Límite elástico: Límite de tracción en x: Módulo de elasticidad en x: Coeficiente de Poisson en xy: Densidad: |
PLA Ortotrópico elástico lineal Desconocido 2.06807e+008 N/m^2 4.8e+007 N/m^2 2.119e+009 N/m^2 0.3 1200 kg/m^3 |
Sólido 1(MatrizC1)(Muñon-1) |
| Datos de curva:N/A | |||
 |
Nombre: Tipo de modelo: Criterio de error predeterminado: Límite de tracción: Módulo elástico: Coeficiente de Poisson: Densidad: Módulo cortante: |
ABS PC Isotrópico elástico lineal Desconocido 4e+007 N/m^2 2.41e+009 N/m^2 0.3897 1070 kg/m^3 8.622e+008 N/m^2 |
Sólido 1(Cortar-Extruir7)(pantorrilla-1), Sólido 1(Saliente-Extruir2)(socket-2) |
| Datos de curva:N/A | |||
Una vez analizados los materiales lo que prosiguió, fue la realización de la prótesis, El prototipo que hicimos tiene el sócket de PLA, cuerpo de PETG y el pie protésico adquirido en ORTOLAB. Ente sus principales ventajas podemos señalar que fue ensamblada con la posibilidad de adicionar eslabones entre el sócket y el cuerpo para adaptar la prótesis cuando el crecimiento del paciente es reducido y aún no amerita el cambio total de una de las partes; en el sócket se colocó un elastómero que da mayor confort, ajuste y sujeción de la prótesis con el muñón del infante, el cual también podrá ser sustituido cuando sea necesario. En la figura 3 se muestra como quedo finalmente esta propuesta.

Figura 3. Prototipo de la prótesis
Actualmente, estamos desarrollando el diseño de un pie articulado para la prótesis con diferentes materiales (elastómeros y silicón) y las propiedades mecánicas de amortiguamiento requeridas.
Con los análisis desarrollados podemos concluir que el proyecto es viable para infantes con un peso inferior a los 40Kg, teniendo la ventaja de las geometrías irregulares, por lo que con un poco más de desarrollo y experiencia, además de hacer un análisis más cuantitativo de más materiales y un estudio de diferentes padecimientos o causas de pérdida de extremidades inferiores. Parte de las complicaciones enfrentadas en este proyecto es lo inaccesible que es a algunos datos sobre diseño y sobre padecimientos, además de la poca investigación que hay sobre los crecimientos de las extremidades amputadas o en extremidades afectadas.
En general podemos concluir que con un poco más de tiempo la prótesis puede ser entregada y usada para poder analizar la relación entre el comportamiento esperado y el comportamiento real.