
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 1, 2018
A nivel mundial entre 250,000 y 500,000 personas sufren algún tipo de lesión medular al año [1]. Existen herramientas de apoyo para los pacientes parapléjicos, como sillas de ruedas y ortesis no mecánicas, pero estas no brindan la libertad de movimiento y por ende la mayoría de las veces favorecen al aislamiento del mismo. También se cuenta en el mercado con exoesqueletos robóticos de asistencia y rehabilitación, pero estos superan los U$60,000, un recurso económico con el que muchos pacientes a nivel mundial no cuentan. En este trabajo se muestra el diseño de un exoesqueleto de miembros inferiores de bajo costo para asistir a personas con paraplejia. El diseño mecatrónico se realizó utilizando la metodología QFD, enfocado a características importantes en el prototipo tales como el precio, seguridad y ergonomía. El exoesqueleto está diseñado para ser construido utilizando métodos de manufactura rápidos y accesibles, como la impresión 3D o el maquinado CNC, usando de este modo materiales de bajo costo, pero resistentes.
El sistema busca tener movimientos predefinidos en forma secuencial, para facilitar la movilidad del paciente y proveer sostenibilidad limitada. El prototipo final permite auxiliar a las personas con discapacidad en su movimiento, mejorando su calidad de vida 1 línea en blanco
Palabras clave: Exoesqueleto, Impresión 3D, extremidad inferior
En México al año 2010, las personas que tienen algún tipo de discapacidad eran aproximadamente 5 millones representando el 5.1% de la población nacional; de estos el 14.9% fueron causados por algún tipo de accidente, mientras que en nuevo león este tipo de causal representa el 14.74% de la población en el estado [3]. La limitación de movilidad, como caminar o moverse, es una de las consecuencias y por ende el mayor padecimiento entre la población del país. Para ayudar a combatir este tipo de restricciones y evitar las desventajas de los equipos convencionales, como sillas de rueda, muletas u ortesis manuales, surgieron los exoesqueletos que son estructuras capaces de transmitir el peso del torso y la fuerza ejercida por este hacia el suelo sin necesidad de ser soportado por las piernas. Brindando así la movilidad e independencia que el paciente perdió, además de ayudar a su rehabilitación [2].
Un exoesqueleto se compone principalmente por 5 partes [8]. El marco, las baterías, los sensores, los controladores y los actuadores. El marco, esta usualmente hecho de un material resistente que permite el soporte del cuerpo del usuario y el peso del exoesqueleto. Generalmente se utilizan métodos de manufactura especializados en mejorar las estructuras para no basarse únicamente en las características de los materiales utilizados. El marco tiene conexiones en los puntos de articulación para permitir movilidad en las mismas uniones del cuerpo, como las rodillas o la cadera.
Las baterías, son la fuente de alimentación de el exoesqueleto y son de gran importancia para el funcionamiento correcto del sistema. Estas, deben tener la facilidad de ser remplazadas sin desmontar el sistema completamente.
Los sensores, capturan información alrededor del usuario para permitir un movimiento fluido. Estos pueden ser manuales, como un sistema para darle movilidad y control al exoesqueleto o pueden ser eléctricos y funcionar con impulsos fisiológicos del usuario.
El controlador y los actuadores pueden ser considerados como parte de un solo sistema. El controlador es considerado el cerebro del sistema, que toma la información de los sensores y la envía a los actuadores quienes fungen como músculos, proporcionando movilidad a cada articulación del exoesqueleto.
El objetivo principal de este proyecto es diseñar un dispositivo electromecánico como apoyo para personas con problemas motrices en la parte inferior del cuerpo, basado en las exo-estructuras, siendo este adaptable según las deficiencias motrices del usuario.
Objetivos particulares:
El exoesqueleto fue diseñado en base a la necesidad de un dispositivo capaz de asistir a personas con padecimientos motrices. El procedimiento fue dividido en tres fases principales, Definición del Problema, Análisis y Diseño e Implementación.
Durante la definición del problema, se encontraron necesidades básicas. Un sistema de bajo costo principalmente, capaz de ser reparado en secciones sin afectar el uso del sistema general, esto para evitar la suspensión de su uso por mantenimientos o fallas menores. Un exoesqueleto enfocado a personas de bajos recursos con la capacidad de ser personalizado a diferentes tamaños y estaturas, resistente y con un diseño versátil y sencillo.
La fase de análisis y diseño permitió enfocarse en los materiales utilizados. Un sistema que se fabrica con manufactura de bajo costo y que es sistemático y modulable. Finalmente, durante la implementación se buscó conseguir sistemas de control capaz de acoplarse al diseño del exoesqueleto. Desmontable y de implementación sencilla. Un conjunto de electrónica dirigida a retroalimentar el sistema motriz del exoesqueleto.
El resultado es un exoesqueleto modulable, mostrado en la Figura 1. El sistema final se divide en 3 partes principales enfocadas en cada parte de la pierna enfocada en movimientos durante la marcha.
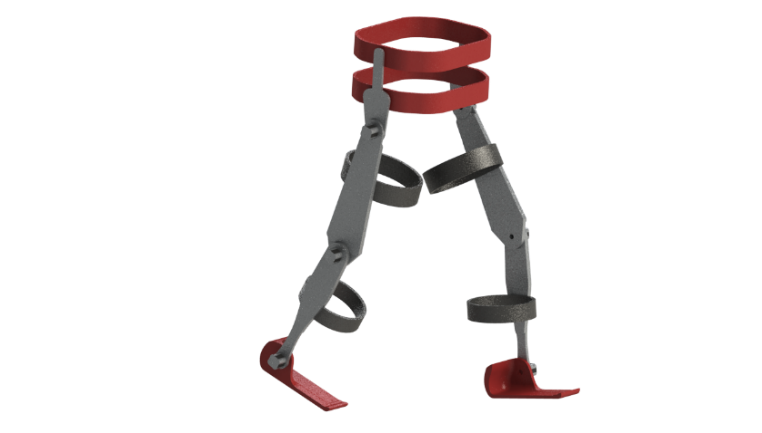
Figura 1. Exoesqueleto modulable, formado por 3 subsistemas intercambiables para su fácil mantenimiento y reparación
La parte inferior, que se muestra en la Figura 2, corresponde al soporte del pie y del tobillo, el cual es manufacturado utilizando la tecnología de impresión 3D en material ABS+ para mejorar su resistencia. El soporte de la planta del pie lleva en la base material antiderrapante para mejorar su adhesión a superficies lisas. En el tobillo se encuentra el primer módulo de motor, cada módulo es removible con una conexión snap on y contiene un Arduino mini [4] controlando un motor NEMA 23 [5] usando una alimentación externa. El módulo de motor es capaz de rotar el tobillo para apoyar el movimiento de dorsiflexión y plantar flexión en un rango de -30º a 30º.

Figura 2. Parte inferior del mecanismo, permitiendo soporte al pie y motores intercambiables. Esta parte esta manufacturada con impresión 3D para reducir costos de producción
La segunda parte corresponde al soporte de rodilla donde se localiza un segundo módulo de motor de conexión snap on para su fácil retiro. Este motor programado a un movimiento de entre -120º a 0º [6] asistiendo la flexión de la rodilla durante la marcha. Finalmente, la tercera parte se encuentra en la cadera donde un tercer modulo permite rotación de entre -20º y 20º. Esta última parte también contiene el sistema de control y alimentación portátil del exoesqueleto. Este módulo consiste en una batería HP12-40 marca Heycar a 12 v proporcionando 40 Ah, batería de electrolito retenido en fibras separadoras de microfibras de vidrio [7].
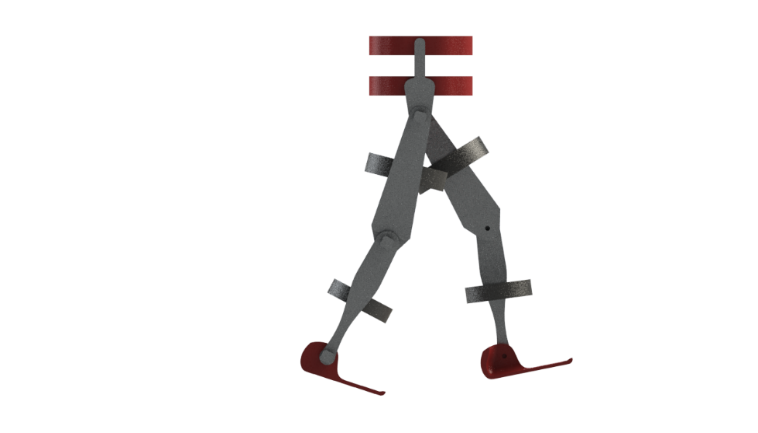
Figura 3. Sistema completo, conectado con estructuras de PTR para facilitar su construcción. Cada pieza del sistema es removible para su reparación individual. El soporte de la cadera fue impreso en 3D y los agarres del muslo y la pantorrilla son de velcro
Cada parte del sistema se ensambla con una barra tipo PTR (Perfil Tubular Rectangular) de 1” x ½” capaz de auxiliar al paciente durante la marcha, manteniendo seguridad y soporte como se muestra en la Figura 3.
La innovación en tecnologías enfocadas a apoyar diferentes padecimientos motores amplia las características básicas y específicas de nuevos dispositivos diseñados. El exoesqueleto presentado en este poster está enfocado en ayudar a pacientes con bajos recursos, pero al mismo tiempo se enfoca en reducir ese rango de precios entre tecnologías de punta y tecnologías disponibles para el resto del mundo. El exoesqueleto, aunque sencillo, cumple con las necesidades físicas y tecnológicas planteadas.
El trabajo a futuro puede ser enfocado en desarrollar un sistema de lazo cerrado que permita el control del exoesqueleto a disposición del usuario, sin tener movimientos precargados o limitantes. Un sistema así permitiría obtener información del dispositivo para mejorar cada pasa y apoyar no solo en actividades diarias si no también en rehabilitación para una mejor calidad de vida.