
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 1, 2018
La exploración de la marcha nos ayuda a revelar las posibilidades motoras, la capacidad para llevar a cabo diferentes actividades cotidianas y así, valorar el impacto en la calidad de vida. El análisis cualitativo y cuantitativo de las características y parámetros de la marcha ha despertado un gran interés, debido a que las alteraciones en los parámetros que la conforman han sido asociadas con factores antropométricos, procesos o cambios normales relacionados con el proceso de envejecimiento, o como consecuencia de alteraciones biomecánicas a causa de diferentes patologías. Este trabajo presenta la adaptación de un laboratorio portable de la marcha, que utiliza sensores Inertial Measurement Unit (IMU) cuyo objetivo es obtener información acerca de la velocidad, orientación, y fuerzas gravitacionales, usando una combinación de acelerómetros y giroscopios.
El laboratorio permite, sin el uso de cámaras, analizar los posibles signos que se presentan en la marcha para detectar padecimientos neurológicos. Los IMU se colocan en los miembros analizables y por medio de un software diseñado se puede observar la posición y la velocidad de movimiento del usuario. El objetivo final del prototipo es poder comparar la información obtenida con bases de datos precargadas para poder detectar padecimientos.
Palabras clave: Marcha, IMU
La marcha humana es un proceso biomecánico extremadamente complejo, el interés en el análisis de la marcha humana surge por el hecho de que brinda información sobre posibles procesos patológicos que no son directamente observables, excepto mediante el uso de técnicas altamente invasivas [1]. Hoy en día el análisis de la marcha en pacientes que hayan sufrido algún tipo de accidente cardiovascular se realiza con sistemas de visión o sistemas basados en sensores inerciales. En este estudio se elabora un prototipo de un sistema portátil capaz de analizar desórdenes de la marcha en pacientes con algún desorden motriz, esto con el objetivo de adquirir más información que el ojo humano no puede percibir a primera vista. Estos sistemas son frecuentemente utilizados para cuantificar alteraciones de los patrones de marcha en disciplinas como fisioterapia, reumatología, ortopedia, rehabilitación o para identificar trastornos del aparato locomotor de origen neurológico.
Un análisis observacional podría resultar insuficiente en la detección oportuna de enfermedades más complejas, por lo que podemos utilizar este sistema para complementar el diagnóstico, tratamiento, seguimiento e implementación de métodos de rehabilitación, también nos permite inferir el pronóstico del padecimiento e iniciar un manejo oportuno y el más conveniente, en patologías asociadas con el movimiento [1]. El sistema presentado en este proyecto, consiste en un laboratorio portátil para el análisis de la marcha. Este está compuesto por cuatro unidades de medición inercial (IMU), integradas por acelerómetros y giroscopios basados en tecnología de sistemas electromecánicos (MEMS), y es capaz de calcular la inclinación de cada unidad sensorial en tiempo real. Dentro de los parámetros que el sistema busca identificar en la marcha se encuentran:
La alteración de la marcha puede verse afectada en cualquiera de sus parámetros (espaciales, temporales, espaciotemporales y cinemáticos) por causas multifactoriales. Dentro de las principales condiciones patológicas que alteran el patrón de marcha encontramos las alteraciones neurológicas como resultado de un accidente cerebrovascular, traumatismo craneoencefálico, trauma raquimedular, esclerosis múltiple, demencia, enfermedad de Parkinson, etc. [2]. Por lo tanto, el objetivo principal de este proyecto va enfocado en realizar un sistema portátil para analizar la marcha y asistir al análisis observacional que se lleva a cabo actualmente.
Los objetivos específicos de este dispositivo son los siguientes:
Se lleva a cabo el desarrollo de un sistema de captura de movimiento compuesto por cuatro unidades sensoriales las cuales se conectan vía bluetooth a un controlador, el cual transmite información vía USB (Figura 1). Las unidades sensoriales están compuestas por acelerómetros y giroscopios triaxiales.
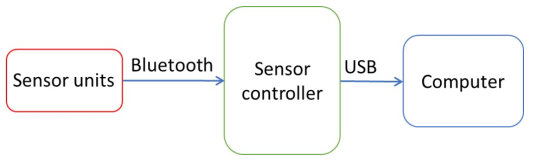
Figura 1. Esquema de transferencia de datos inerciales desde las unidades sensoriales hacia la computadora
Este sistema se coloca en los miembros inferiores, uno en el segmento arriba de la rodilla y otro en el segmento abajo de la rodilla. Para el correcto funcionamiento del sistema, se aplica una secuencia de calibración, esto para asegurar la comunicación de los diferentes dispositivos mencionados y evitar pérdida de información al momento de usar el sistema. Después se obtienen los ángulos quaternions de cada una de las unidades sensoriales en tiempo real y se muestra la orientación de cada una dentro de la interfaz del software Processing.
El sistema obtenido consiste en un conjunto de módulos independientes conformados por un giroscopio, un acelerómetro y un sistema bluetooth. Cuatro módulos se conectan a un controlador central que recibe información en tiempo real de cada parte del sistema Fig. 1. Los módulos son colocados en cada segmento de la pierna (debajo y encima de la rodilla) con una cinta de ajuste para evitar movimientos y ruido durante las mediciones.
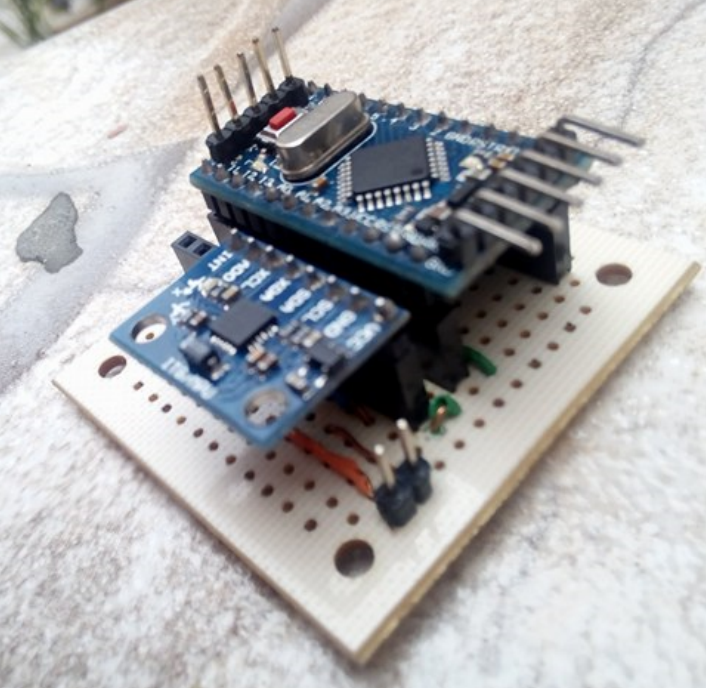
Figura 2. Módulos IMU
Para las primeras pruebas se realizaron diferentes posicionamientos de los módulos a diferentes ángulos, demostrando la capacidad de cada IMU de detectar de manera comparativa la posición deseada. En la tabla 1 se muestra un ejemplo de la respuesta gráfica del sistema referente a la orientación en tiempo real de una unidad sensorial.
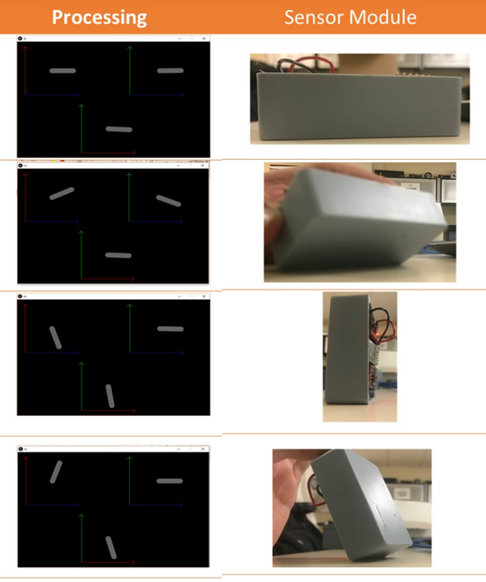
Figura 3. Por medio del software processing se muestra la orientación de la unidad sensorial en tiempo real. En la columna izquierda se muestra una imagen de la orientación del dispositivo y en la columna derecha se muestra la representación de su orientación
De acuerdo con los resultados de la implementación de este sistema, es posible obtener la orientación del mismo dispositivo en tiempo real mediante el uso del software gráfico Processing. Actualmente el sistema solo detecta la inclinación de cada sensor. Sin embargo, como trabajo a futuro, este sistema puede enfocarse en derivar la posición de las unidades sensoriales en tiempo real de los datos proporcionados por los acelerómetros triaxiales y utilizando ecuaciones matemáticas derivadas de los quaternions obtenidos con la información de los IMU.