
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 2, 2019
La adquisición de imágenes y su codificación para ser transmitida a otros dispositivos o interpretadas por los seres humanos es un reto para las disciplinas como la óptica, electrónica y mecánica. Los dispositivos electromecánicos son los más usados para la estimulación de los mecanorreceptores en la piel, en particular los motores vibradores.
En este trabajo presentamos una cuantificación de la estimulación táctil con motores vibradores de 5mm, realizamos pruebas para “medir la sensibilidad” en función de la intensidad de corriente en el motor vibrador. Colocamos los motores vibradores en muñecas, antebrazos y hombros, y cuantificamos la sensibilidad en términos de la percepción inicial y la tolerancia de cada participante. De igual forma, realizamos pruebas de discriminación de percepción entre dos motores vibradores, colocados en el antebrazo, para que ambos sean reconocidos como estímulos independientes.
Palabras clave: Motor vibrador, táctil, cuantificación.
Image’s acquisition and coding in order to be transmitted to other devices or even being interpreted by human beings remains a challenge for disciplines like optics, electronics and mechanics. Electromechanical devices are commonly used for the stimulation of skin’s mechanical-receptors, mainly vibrational motors.
In this work we present a tactile stimulation quantification performed with vibrational motors of 5mm, tests were performed in order to "measure sensitivity" accordingly to current’s intensity of current in the vibrational motor. Such vibrating motors were placed on wrists, forearms and shoulders, so the sensitivity could be quantified in terms of the initial perception and tolerance of each participant. Similarly, tests of perception discrimination were performed between two vibrators, placed on forearm, so both could be recognized as independent stimuli.
Key words: Motor vibrator, tactile, quantification
La piel del cuerpo humano es un órgano que le permite percibir una gran variedad de estímulos, como son: la temperatura, presión, vibración, entre otros. El sentido del tacto está mediado por mecanorreceptores cutáneos, los cuales participan en la percepción de los estímulos, transmiten información básica al ser estimulado con las características de modalidad, localización, intensidad, duración, frecuencia de descarga y densidad de receptores estimulados.1,2,3
Integra los subsistemas cutáneo y cinestésico, y a diferencia de los otros sentidos, tiene la particularidad de responder a estímulos diversos, así como a una sensibilidad general del cuerpo, dada la extensión de los órganos que le sirven de sede (ver figura 1).4,5,6
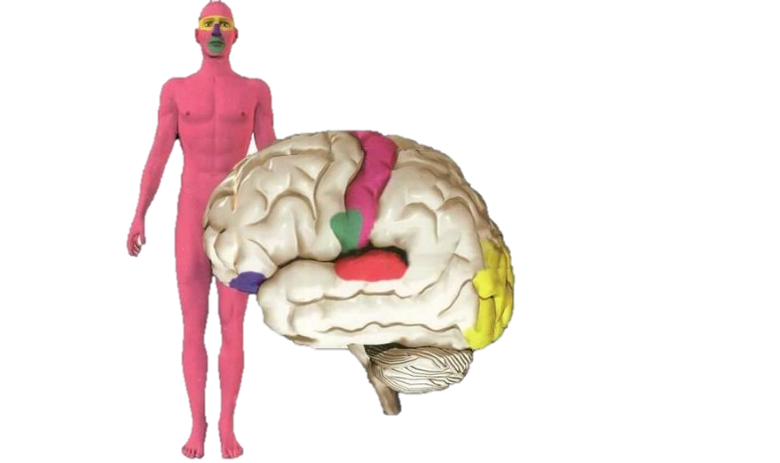
Figura 1. Distribución de los sentidos en el cuerpo humano y el cerebro, siendo la región marcada en rosa la correspondiente al tacto.8
La tecnología háptica permite una estimulación directa a la piel, activando los mecanorreceptores permitiendo la percepción de objetos a través de esta, teniendo aplicaciones en diversas. El desarrollo de diseño de interfaces táctiles es un tema que en los últimos años ha llamado la atención en investigaciones. Existen distintos dispositivos que han sido desarrollados con el fin de descubrir que tan eficientes son los impulsos táctiles. Inclusive se han creado arreglos de matrices que van desde 3x3 hasta 64x64 elementos.7
Para cuantificar la sensibilidad de las personas a una estimulación táctil, se realizaron una serie de pruebas, en las cuales se midió la sensibilidad en función a la intensidad de la corriente en los motores vibradores de 5mm.
Las pruebas se realizaron colocando un motor vibrador en muñecas, antebrazos y hombros, en las zonas palmar y dorsal de ambos brazos. La intensidad del motor vibrador se ajustó variando la corriente, y se solicitó a los participantes que indicaran el instante en que la vibración es perceptible y cuando la vibración les fuera molesta. Se registraron el valor de corriente mínima de detección y la corriente máxima de tolerancia en cada uno de los diez puntos en que se colocó el motor vibrador (zona dorsal: muñecas y antebrazos, zona palmar: muñecas y antebrazos, y hombros).
De manera similar se realizaron pruebas para obtener la separación óptima entre dos motores vibradores, para que los estímulos producidos por ellos sean reconocidos como estímulos independientes.
Se crearon 2 pulseras con dos motores vibradores colocados a 2cm y 4cm en cada una y se programaron en Arduino® 8 secuencias de activación para los motores vibradores, como se muestra en la figura 2, las cuales se envían de forma aleatoria y están limitadas por los valores de corriente mínima y máxima obtenidas en la prueba anterior.
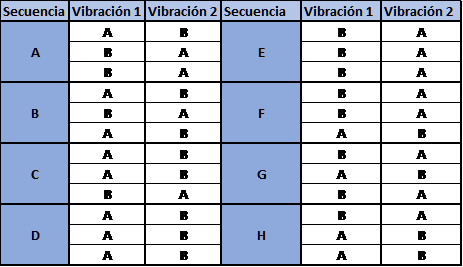
Figura 2. Secuencias programadas, donde A y B son los 2 motores vibradores colocados
Para evaluar la correcta detección de los motores vibradores como estímulos independientes, se colocó la pulsera con los motores vibradores a 2cm en el antebrazo en la zona palmar, se enviaron 5 de las secuencias seleccionadas de forma aleatoria (mostrando la letra asignada en una pantalla LCD), y se solicitó a los voluntarios escribir en un formulario el orden en que detectaron las vibraciones. Posteriormente se colocó la pulsera con los motores vibradores a 4cm, se enviaron 5 secuencias diferentes y se solicitó nuevamente a los voluntarios escribir en el formulario el orden en que detectaban las vibraciones.
Las pruebas se realizaron con 55 voluntarios, hombres y mujeres, entre 18 y 61 años, zurdos y diestros.
Para la primera prueba participaron 24 mujeres y 31 hombres entre 18 y 61 años (ver figura 3), se les explicó el funcionamiento de los motores vibradores, se les dieron las instrucciones de la prueba y se colocó el motor vibrador en la zona palmar de la muñeca de su lado dominante.
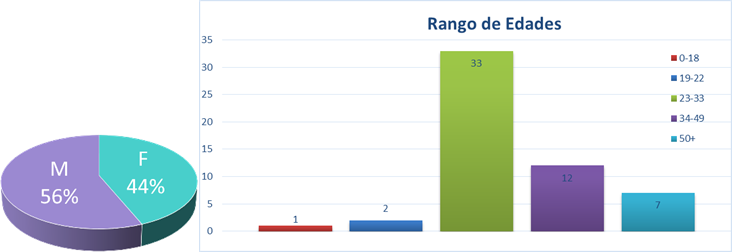
Figura 3. Estadísticas de los voluntarios, por género y rango de edades, para la prueba 1
Se registró el valor de corriente minino detectable y se incrementó la corriente hasta el valor de corriente en que el voluntario indicaba que la vibración le era molesta. Se realizó el mismo procedimiento en los diez puntos de interés, en el orden siguiente, empezando por el lado dominante:
En la figura 4, se muestran los valores promedio obtenidos en cada uno de los puntos de interés, mostrando el valor mínimo detectable y el valor máximo tolerable.
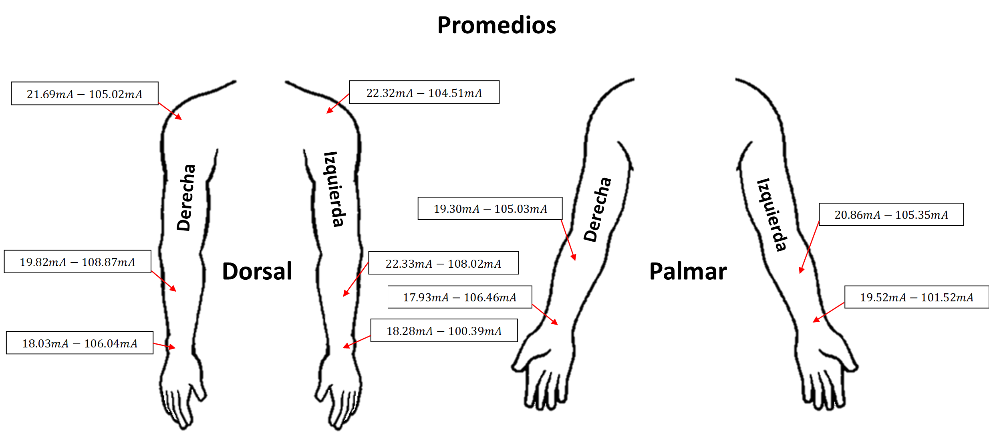
Figura 4. Valores promedio obtenidos (mínimo detectable-máximo tolerable)
Para la primera prueba participaron 23 mujeres y 32 hombres entre 18 y 61 años (ver figura 5), se les explicó cómo llenar el formulario y se les coloco la pulsera en la zona palmar del antebrazo, primero con 2cm de separación entre los vibradores y después a 4cm de separación.
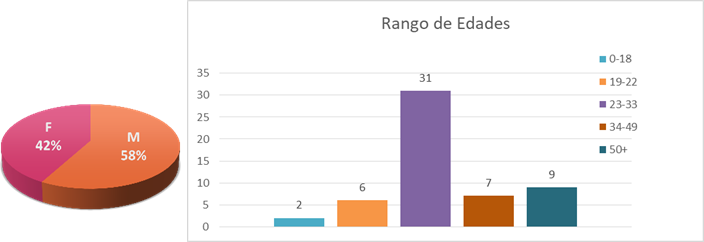
Figura 5. Estadísticas de los voluntarios, por género y rango de edades, para la prueba 2
Se ajustó la corriente entre 21mA y 105mA, a partir de los valores obtenidos en la prueba 1 para la zona palmar del antebrazo, y se seleccionaron aleatoriamente 5 de las 8 secuencias para activar los motores vibradores.
Se evaluaron las respuestas de los voluntarios, considerando una respuesta favorable si era reconocido el orden correcto en que se activaron los motores vibradores, considerando un máximo de 15 aciertos equivalente a una calificación de 100.
En la figura 6 se muestran los valores promedio de aciertos obtenidos al realizar la prueba con los vibradores a 2cm y 4cm.
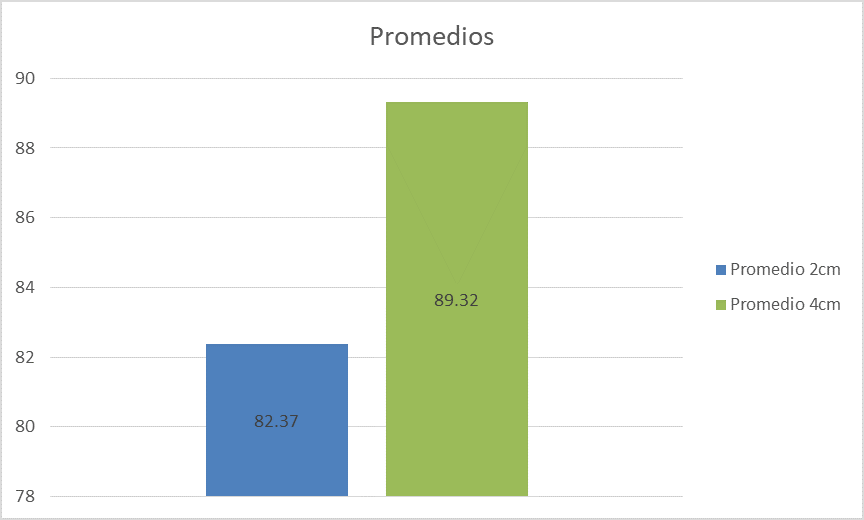
Figura 6. Valores promedio obtenidos
Mediante las dos pruebas realizadas, fue posible cuantificar la sensibilidad de percepción a la vibración de motores vibradores de 5mm en función de la corriente aplicada a estos.
En los resultados es posible apreciar que la región con mayor sensibilidad es la zona palmar de las muñecas, la cual no se vio afectada por la edad de los participantes o por su lado dominante.
Con la segunda prueba, se obtuvieron resultados que permiten determinar que es posible reconocer, como estímulos diferentes, entre dos motores vibrados colocados en la zona palmar del antebrazo con una separación de 2cm y 4cm entre ellos. Este resultado no presenta una diferencia notable entre los participantes conforme a su edad.