
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 2, 2019
En México, la Academia Mexicana de Cirugía indicó en el 2012, que al día se realizaban 75 amputaciones de mano, lo que significa 27.375 amputaciones por año, las amputaciones de la muñeca de la mano representan del 3 al 15% del total de estas.
Cada día el diseño de las prótesis se vuelve un reto para los ingenieros e investigadores, toda vez que el propósito es lograr la aceptación del paciente, reducir costos en los diseños y en el mantenimiento.
El presente trabajo describe el diseño de los actuadores basados en las Aleaciones con Memoria de Forma (SMA por sus siglas en inglés), implementados en una prótesis de mano.
Palabras Claves: Prótesis de mano, Aleaciones con Memoria de Forma, Resorte SMA
In Mexico, the Mexican Academy of Surgery indicated in 2012, that 75 hand amputations were performed per day, which means 27,375 amputations by year, amputations of the wrist of the hand represent 3 to 15% of the total of these.
Every day the design of prostheses becomes a challenge for engineers and researchers, since the purpose is to achieve patient acceptance, reduce costs in designs and maintenance.
The present work describes the design of the actuators based on the Alloys with Memory of Form (SMA for its acronym in English), implemented in a hand prosthesis.
Keywords: Hand prosthesis, Shape Memory Alloy, SMA spring
Para el diseño y construcción de una prótesis de mano se involucran varias áreas de la ingeniería. En los últimos años varias investigaciones han ido consolidando el diseño, construcción y control de prótesis de mano, con diferentes tipos de mecanismos y control, utilizando una variedad de materiales modernos aprovechados por la tecnología actual.
En el trabajo reportado en [2], se propone el diseño de una prótesis de mano antropométrica y antropomorfa, a partir de la radiografía de un mano humano, cuidando el peso y forma de la prótesis. Dentro de las propuestas futuras de ese trabajo, a la prótesis se le debe integrar un sistema de actuación basado en una pulsera de micromotores para tirar de los tendones. aunque, en ese caso, el sistema debe estar controlado por señales cerebrales o musculares; dado que esta opción parece compleja de implementar en poco tiempo, la opción enfocada es generar los movimientos manualmente a través de un sistema de anillos (brazaletes) en el antebrazo del usuario, que permite mover manualmente la prótesis según la situación. Para que una prótesis de mano emule los movimientos de una mano humana debe contar con un sistema de actuación, entre los cuales se encuentran los actuadores eléctricos, mecánicos, neumáticos e hidráulicos.
Por otra parte, las Aleaciones con Memoria de Forma (SMA por sus siglas en inglés), son materiales metálicos con una propiedad que les permita regresar a una forma preestablecida. A estos materiales se le da una forma cuando su temperatura aumenta desde una condición inicial baja [3]. Uno de los materiales comerciales más utilizados para Producir SMA es una aleación metálica compuesta de níquel y titanio (NiTi) o nitinol. La relación habitual en la composición de esta aleación es de alrededor del 50% -50% [4], lo que significa que el comportamiento de la SMA se limita a las aleaciones de NiTi. Estos materiales se comportan con histéresis, es decir, cuando la relación carga-deformación se está ejecutando en bajas temperaturas, la aleación se comporta como un objeto de plástico (primera fase ó fase martensita), pero cuando la temperatura aumenta el comportamiento se vuelve pseudoelástico (segunda fase ó fase austenita) [5].
Una muestra preformada de SMA tiene una deformación inicial a bajas temperaturas con una carga interna más allá del límite de rendimiento, en el calentamiento de esta muestra se introducen algunas fuerzas internas en el material, lo que lo lleva a una deformación.
El SMA en consecuencia vuelve a su configuración inicial, este efecto es el llamado Shape Memory Effect (SME, por sus siglas en inglés).
En el presente trabajo se propone una metodología para el diseño de actuadores basados en Aleaciones con Memoria de Forma, el diseño de la prótesis de mano y la implementación de los actuadores en el mecanismo de la prótesis.
Para el diseño del actuador con Aleaciones con Memoria de Forma se siguió un método con el fin de modificar su SME, como se presenta en el Diagrama 1.
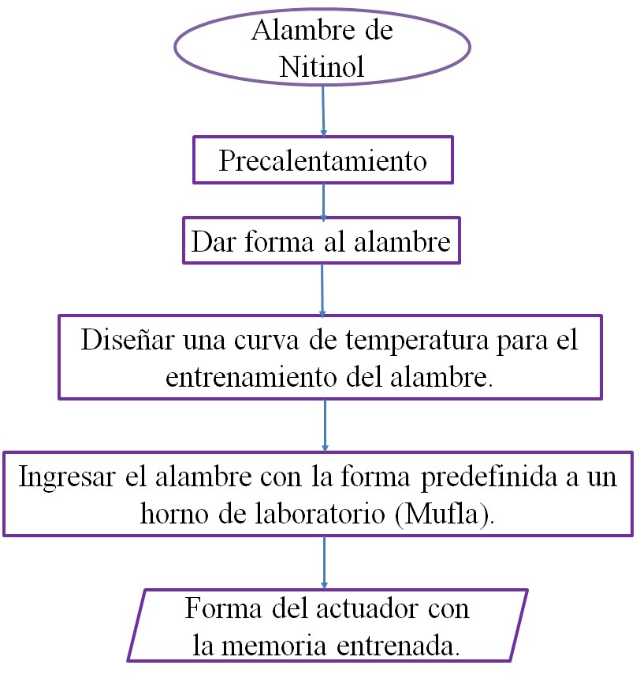
Diagrama 1. Procedimiento para el diseño del actuador
Los SMA comerciales tienen un SME muy estrecho con un predefinido alargamiento (no más de 3–5% con respecto a su tamaño inicial). Esto significa que un cable largo genera solo un pequeño movimiento cuando la temperatura se varía alrededor de la temperatura de la fase austenita.
Por lo tanto, es necesario definir la forma, el tamaño del actuador y elegir el diámetro del alambre con SMA, de acuerdo con las necesidades del prototipo.
Una vez, definidas las condiciones para el diseño del actuador, se sigue el procedimiento descrito en el Diagrama 1. Para el desarrollo de este trabajo se eligió: un alambre SMA comercialmente conocido como “Flexinol” de calibre 0.75mm; darle forma de resorte con un diámetro de 2.5 cm. En la figura 1. se muestra el diseño final del actuador en forma de resorte.

Figura 1: Resorte SMA 0.75 mm
Para la caracterización de los actuadores con Aleaciones con Memoria de Forma se realizó el siguiente procedimiento:
a). Diseño de la plataforma
En la figura 2, se presenta la plataforma experimental que se construyó para realizar la caracterización del actuador. La plataforma cuenta con un dinamómetro, que es un instrumento para medir fuerzas y el actuador está anclado a la base experimental.
b). Experimentación.
Se realizaron videos durante 1 minuto, se expuso el actuador a diferentes valores de corriente y voltaje, además en este ítem se elaboró una tabla de caracterización del actuador SMA como se ilustra en la Tabla 1. Por cada valor de corriente y voltaje se realizaron cinco muestras en 60 segundos, con la finalidad de observar el cambio de las propiedades, cuando el material es sometido a constantes repeticiones en un mismo valor de corriente, y a la vez observar si la fuerza del material variaba después de ser llevado al mismo valor de temperatura en segmentos seguidos.
Tabla 1. Datos de la caracterización
| Corriente (A) - Voltaje (V) | Tiempo (Seg) | Fuerza en Newton(N) | Temperatura alcanzada °C | Temperatura Ambiente °C | Temperatura resultante °C |
| 2A - 12V | 60 segundos | 6 N | 54.2 | 25.2 | 29 |
| 2.5A -12V | 60 segundos | 7 N | 64.3 | 25.2 | 39.1 |
| 2.8A -15 V | 60 segundos | 7.5 N | 78.8 | 25.2 | 53.6 |
| 3.0A -15V | 60 segundos | 8 N | 90.3 | 25.2 | 65.1 |
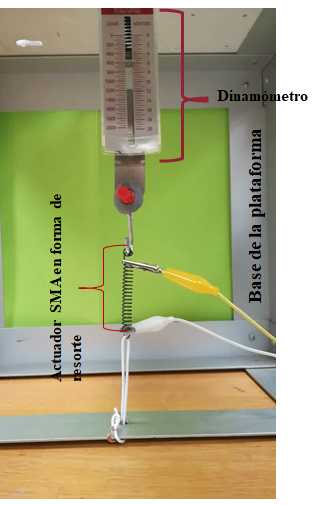
Figura 2: Plataforma experimental para caracterizar el actuador SMA
c). Procesamiento Digital de Imágenes.
Después de obtener los videos de cada valor de corriente, se realiza el procesamiento Digital de Imágenes, utilizando el software Image J.
Para usar el software, es necesario contar con las imágenes del video, de manera que para extraer los “frames” o las imágenes, se utilizó el programa IrfanView, este programa genera 30 imágenes por cada segundo del video, por lo tanto, para los 60 segundos genera 1800 imágenes. Una vez obtenidas las imágenes, se procede hacer el procesamiento de estas, utilizando el software seleccionado, el programa permite seleccionar una (01) imagen por cada 60 imágenes, de tal forma que al final selecciona 60 imágenes de las 1800.
En la figura 2 se observa un punto rojo, que es la referencia para el procesamiento digital de imágenes, el objetivo es detectar la marcación del punto rojo con un Threshold Color en RGB, luego de detectarse el punto rojo, se realiza una binarización, ahora el punto rojo a B&W y este procedimiento se aplica a las 60 imágenes.
Al objeto detectado en B&W se le aplica un análisis de partícula, que genera un vector en Y en milímetros (mm), donde se analiza el desplazamiento del resorte. Una vez obtenido el vector se procede a graficar los datos y obtener la curva de caracterización para cada valor de corriente y voltaje.
La figura 3 muestra las curvas de caracterización del actuador en los diferentes valores de corriente y voltaje, donde por cada valor de corriente se extrajo la curva con mejor desempeño.
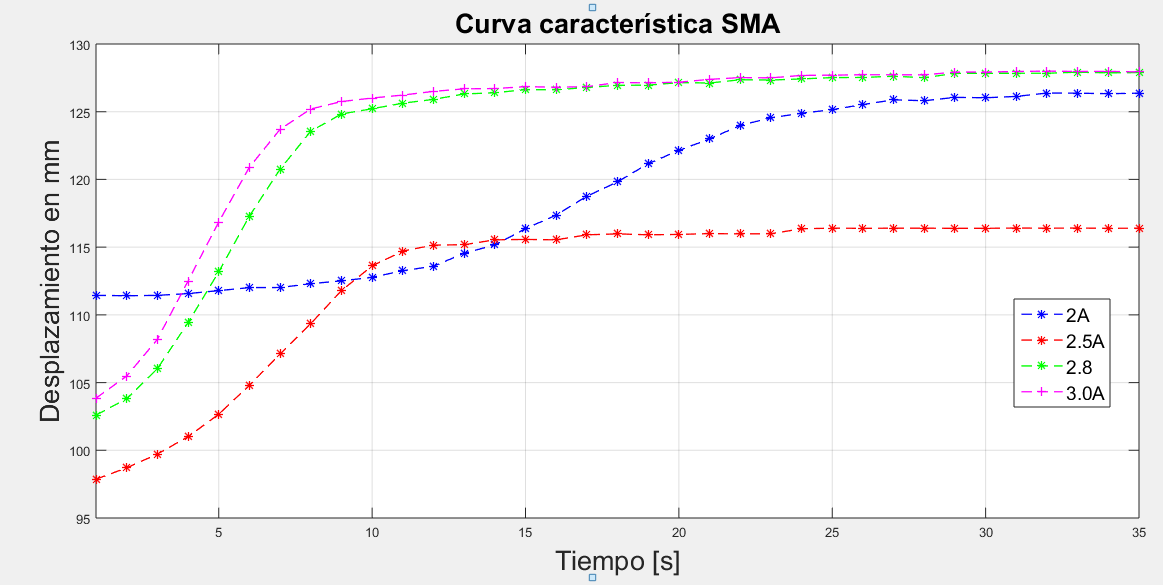
Figura 3. Curva característica del actuador
En la figura 3 se graficó la fuerza obtenida en cada valor de corriente, pues la fuerza esta relacionada con la temperatura, y la temperatura es proporcional a la corriente, de esta gráfica se percibe que el comportamiento de la fuerza es lineal. En la figura 5, se representa el comportamiento de la temperatura, donde se denota que esta es exponencial.
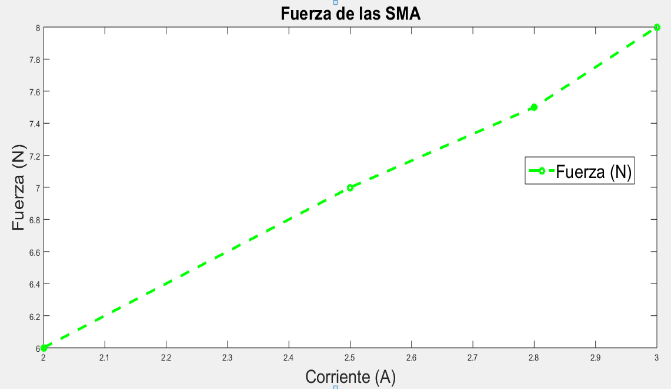
Figura 4. Curva de fuerza de los actuadores
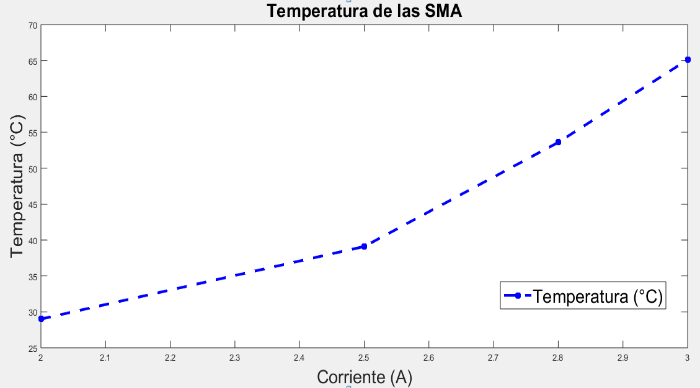
Figura 5. Curva de temperatura de los actuadores
En este ítem se presenta el diseño de la prótesis de mano y la adaptación de los actuadores en el mecanismo. El diseño de la prótesis tiene como antecedente el trabajo presentado en [2], donde a partir de una radiografía y haciendo uso de SolidWorks © se extraen las medidas de las falanges, como se visualiza en la figura 6.
De esta manera los dedos de la prótesis de mano están diseñados y construidos por las falanges, las uniones de las falanges son de hylo de nylon ultralon de calibre 0.6 mm, este hylo es rígido y resistente a los esfuerzos mecánicos, lo que permite que sea estético y funcional, como se ilustra en la figura 7.
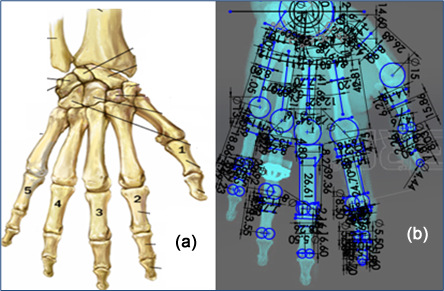
Figura 6. (a) Falanges de la mano (b) Mediciones tomadas de una radiografía

Figura 7. Impresión de un dedo de la prótesis (A) parte superior del dedo (B) Parte Inferior
Para los tendones flexores y extensores se eligió una cuerda de hylo de nylon monofilamento de 0.5 mm de diámetro, este tipo de hylo es resistente a los esfuerzos mecánicos, es transparente y flexible, lo cual permite que, en el desplazamiento existan menos fricciones y en movimiento del dedo sea natural.
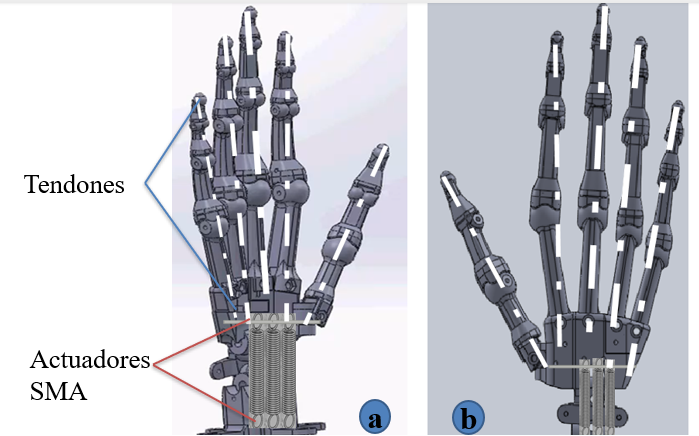
En la figura 8 se presenta el ensamble de los actuadores con los dedos de la prótesis, para lo cual se toma como punto de referencia la muñeca de la prótesis. Los actuadores están anclados a la superficie de la muñeca de la prótesis y adheridos al final del tendón de hylo de nylon de los dedos como se muestra en la imagen
Los actuadores están en los tendones flexores y extensores, con el fin de apreciar el sistema agonista-antagonista en los resortes SMA, debido a que los actuadores se comportan como un musculo de cable, cuando uno de ellos esta contraído el otro músculo (actuador) esta relajado, como se ilustra en la figura 9.
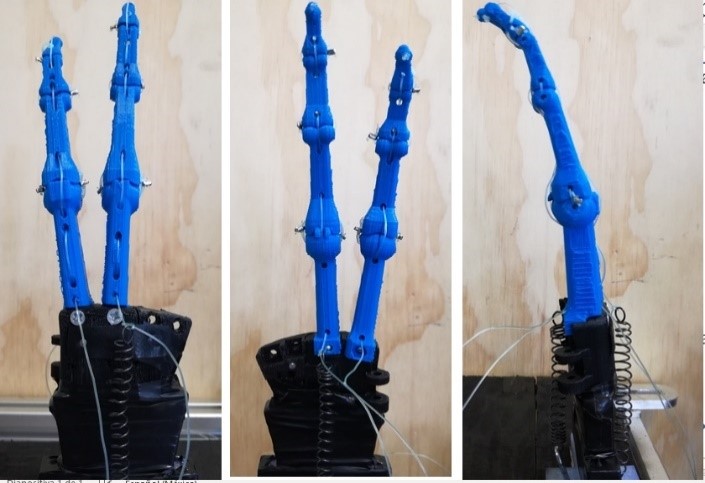
En la figura 10, se representa el ensamble de la prótesis de mano, con las falanges, ligamentos y tendones.
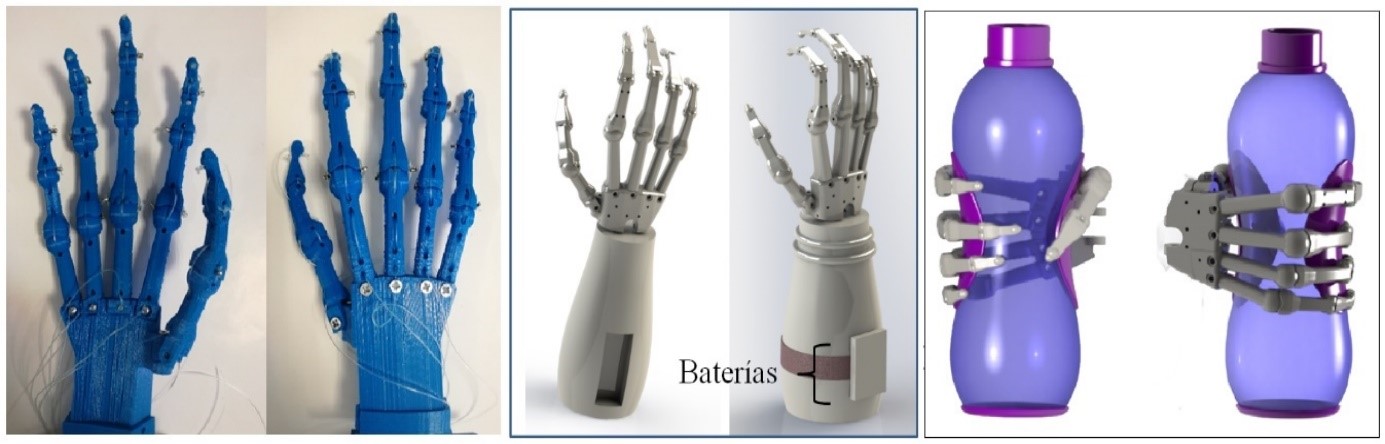
Figura 10. (a)Impresión actual de la prótesis de mano; (b) Propuesta final de la prótesis; (c) Agarre a partir del movimiento de flexión
Agradecimiento a la PhD. Norma Beatriz Lozada por el finamiento para la presentación de este proyecto. A Daniel Cedillo y Raúl Avendaño por su participación en el proyecto.