
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 2, 2019
Se ha encontrado que en un porcentaje de la población los traumatismos en cadera y columna están asociados con anomalías en la caminata, los cuales pueden evitarse corrigiéndose de forma temprana e incluso su detección es útil para mejorar el desempeño de atletas y competidores de alto rendidmiento. En éste trabajo se propone una metodología para analizar y optimizar la caminata de un pequeño robot humanoide. Se utilizan diversos algoritmos para eliminar el ruido e identificar las señales armónicas propias del movimiento (análisis de Fourier), comparándolas con modelos de muy alta simetría, con lo cual se identifican de forma general y, posteriormente, de forma local las anomalías, mediante un conjunto mínimo de acelerómetros ubicados estrategicamente por el algoritmo de análisis, lo que nos permite conocer las características y ubicación de dichas anomalías para ser atendidas por un especialista.
Palabras Clave: Anomalías en la Caminata, Robot Humanoide, Análisis de Fourier, Acelerómetro, Algoritmo
It has been found that in a percentage of the population the injuries in hip and spine are associated with abnormalities in the walk, which can be avoided by correcting early and even its detection is useful to improve the performance of athletes and competitors of high performance. In this work we propose a methodology to analyze and optimize the walk of a small humanoid robot. Various algorithms are used to eliminate the noise and identify the harmonic signals of the movement (Fourier analysis), comparing them with very high symmetry models, with which they are identified in a general way and, subsequently, locally anomalies, by means of a minimum set of accelerometers strategically located by the analysis algorithm, which allows us to know the characteristics and location of said anomalies to be attended by a specialist.
Key Words: Walk Anomalies, Humanoid Robot, Fourier Analysis, Accelerometer, Algorithm
En México, alrededor de 6% de la población tiene alguna discapacidad; el cual representa más de 5 millones de personas. Entre las más comunes está la discapacidad motriz (problemas para caminar, manipular objetos y de coordinación para realizar actividades). (Salud, 2017).
Un mecanismo para rehabilitar a estas personas son las terapias físicas o fisioterapias. La terapia física busca lograr el proceso de recuperación de los pacientes que han sufrido alguna discapacidad, pero antes de la rehabilitación se debe pasar por una evaluación que indique las terapias que necesitan las personas como las terapias físicas y reeducación motriz entre otras. (Porigualmas.org, 2019)
Los avances tecnológicos han llevado al uso de la robótica para mejorar el proceso de rehabilitación, ya que han permitido la aparición de nuevas y mejores herramientas de diagnóstico clínico y tratamientos más rápidos y precisos para el paciente.
Algunos estudios muestran que las tecnologías integradas en los sistemas de rastreo de movimientos humanos son importantes, ya que han demostrado que ayudan a acelerar la recuperación en el movimiento. (Zhou H, 2008)
En un proceso de rehabilitación en especifico de la caminata existen ciertos patrones establecidos como referencia para el diagnóstico médico y ortopédico, por lo cual, hay diversos estudios donde se analizan estos patrones en pacientes con características diferentes a las referencias y bajo determinadas circunstancias con el objetivo de mejorar dichos patrones y poder rediseñar sistemas de rehabilitación, prótesis y robots humanoides haciendo uso de visión por computadora para el análisis de los patrones. (Arellano-González Juan Carlos, 2017). (Ver Fig.2)
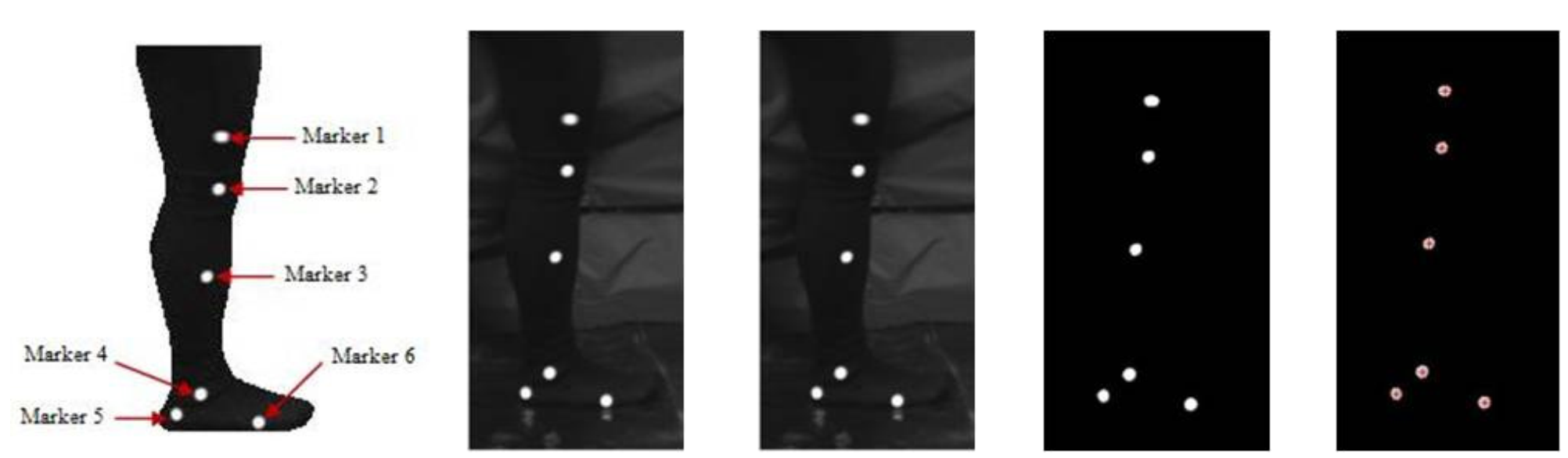
Figura 1. Imagen a procesar a traves de visión por computadora para extraer los puntos y obtener el análisis del patrón de referencia de la caminata
Existen robots humanoides destinados a la rehabilitación de los trastornos de la marcha del adulto mayor, donde un grupo de especialistas realizan un trabajo para hacer una evaluación e iniciar el manejo integral del trastorno de la marcha, lo que permite obtener buenos resultados mejorando la caminata en la mayoría de los pacientes. Sin embargo, estas tecnologías son de alto costo y aún no se han masificado en la práctica clínica. (CERDA, 2014)(Ver Fig. 2)

Figura 2. Sistemas de entrenamiento de marcha con spp y asistencia robotizada, LOKOMAT
Tambien se han usado robots en terapias ocupacionales para niños con alguna discapacidad como NAO el robot social, que está basado en actividades de rehabilitación, las cuales el fisioterapeuta debe configurar para que pueda dirigir sesiones de rehabilitación de forma independiente, tiene una interfaz muy agradable con los niños e incluso dice frases motivacionales. (Corrales, 2016)
El objetivo de este trabajo es implementar un sistema a través del uso del robot humanoide para mejorar la caminata, encontrar anomalías y proponer acciones correctivas en el sistema motriz de predicción de movimientos con la finalidad de generar acciones correctivas en el sistema motriz.
Para implementar el sistema de detección temprana de anomalías motrices es necesario conocer los elementos con los que cuenta el robot humanoide que se utilizará para dicho trabajo como son:
Un conjunto de servomotores: constituido por 10 servomotores de 15 Kg. de torque, Sensores: Consta de un acelerómetro principal ubicado en el centro de masas del robot (cintura) y acelerómetros en algunos puntos del robot, principalmente en posiciones estratégicas para medir la posición en algunos segmentos del robot, comparador: controlador digital implementado en un microcontrolador como Arduino, la posición inicial que consta de los ángulos para todos los servomotores (10 para las extremidades inferiores) y la posición de salida es medida en todo instante por los sensores.
Se propone una posición final a la cual llegará el sistema, se manda una acción de control a los elementos motrices que será evaluada en tiempo real para que en caso de ser necesario detectar la anomalía y emprender las acciones de control al robot. Se muestra el sistema completo en la siguiente figura (ver Fig.3)
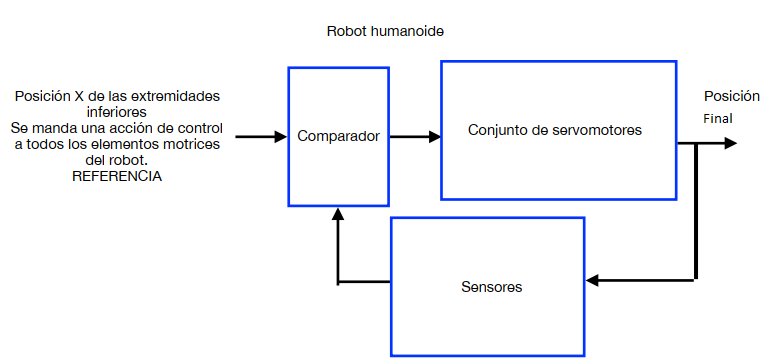
Figura 3. Esquema General del Sistema
Este sistema trabajará con la posición inicial de la señal la cuál genera un conjunto de variables con respecto al tiempo (8 por cada sensor ubicados en posiciones estratégicas), luego la tarjeta de control tomará la decisión de seguir mandando el control a los servomotores o detenerlos con base al análisis en tiempo real de esas variables para determinar si se alcanzará la posición final del sistema o se proceda a una acción correctiva antes del tiempo predeterminado.
En la siguiente tabla se muestran algunos valores de las 8 variables utilizadas en el sistema por cada sensor, que miden la posición inicial (X,Y), la aceleración (Acel. AX, AY) y la velocidad (Vel.AX, AY) de cada servomotor. (ver Tabla 1)
Tabla 1. Ejemplo de Matriz de valores de referencia para el algoritmo que calcula ecuaciones en el sistema que mide las posiciones en cada servomotor. (Solo se muestra una sección de la tabla)
| Tiempo | Posición X |
Posición Y |
Acel. A X |
Acel. A Y |
Vel. A X |
Vel. A Y |
|---|---|---|---|---|---|---|
| t1 | 4.53 | -76.089 | 0.795 | -9.767 | -4.578 | 5.379 |
| t1+ α | 4.70 | -74.225 | 0.814 | -9.575 | -0.099 | -1.961 |
| t1+2α | 3.32 | -74.672 | 0.58 | -9.654 | -1.244 | -7.027 |
| t1+3α | 4.61 | -74.105 | 0.805 | -9.626 | -0.839 | -1.793 |
| t1+4α | 4.64 | -75.155 | 0.812 | -9.712 | -0.793 | -2.937 |
| t1+5α | 6.81 | -74.859 | 1.19 | -9.693 | -1.236 | -2.19 |
| t1+6α | 7.94 | -74.4 | 1.42 | -9.911 | 2.037 | -5.501 |
| t1+7α | 4.86 | -75.338 | 0.821 | -9.384 | 2.625 | -4.349 |
2.1 Algoritmo
Dada una posición de referencia que en lo sucesivo se llamará r(t) representada en la tabla anterior, se calcula el ángulo (α1… αn) de inclinación con respecto al tiempo, que tendrá que mover el robot humanoide asociado a cada servomotor para quedar en una posición determinada.
Al moverse el robot se genera un análisis de las variables con respecto al tiempo para calcular el ángulo, la componente o gráfica de estos datos va a tener una trayectoria, entonces para calcular la ecuación se tiene en principio que trabajar con los 2 primero puntos de cada columna de la tabla anterior para predecir la trayectoria que tomará la curva, estos datos los debe de procesar la tarjeta de control para trazar las curvas y estimar por donde ira el sistema.
Así que conforme va obteniendo los puntos va trazando la curva lo que hace posible, no esperar el ángulo final en el tiempo inicial, sino que trazará un nuevo ángulo dado que la estimación predijo que no se cumplirá el movimiento inicial. Para esto se tienen que trabajar con 88 variables (8 por cada servomotor y son 10 servomotores), pero solo se trabajarán 8 iniciales dado que son el centro de masa y algunas más, asociadas a algunos servomotores de manera estratégica que indiquen el movimiento. Los servomotores tendrán asociada una función de probabilidad f(x) que indicará si el ajuste de curvas empieza a coincidir con el movimiento y decir si este modelo es el adecuado, entonces la probabilidad será de éxito dada la estimación probabilística (ver Fig.4)
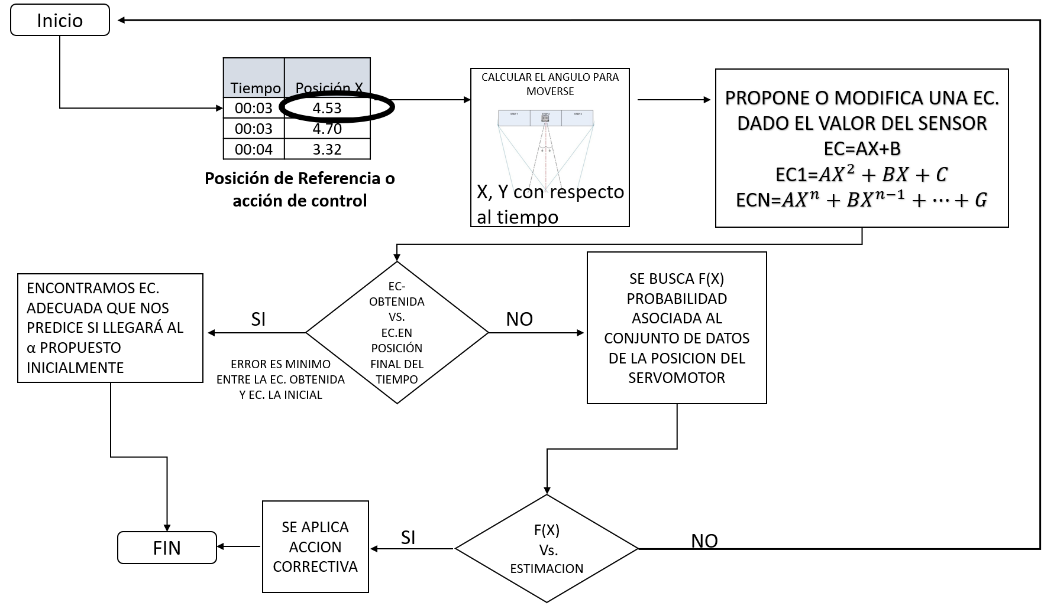
Figura 4. Algoritmo para generar ecuaciones que me indican el ángulo de movimiento
Con esta primera fase del sistema se podrán predecir las ecuaciones para detectar las anomalías y además generar una acción correctiva antes de que cumpla con el tiempo estimado inicialmente.
Posteriormente una vez obtenidas las ecuaciones que predecirán el movimiento mediante el cálculo de los ángulos (α1… αn) se aplicará Laplace y se obtendrá el modelo completo.
Recordando que en este trabajo se requiere activar una rutina que permita realizar un ajuste correctivo.