
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 2, 2019
Existen diversos traumatismos que generan una deficiencia motriz y que requieren una fisioterapia de rehabilitación personalizada y un seguimiento continuo en su evolución. El exoesqueleto inteligente para fisioterapia de mano será capaz de tomar decisiones a partir de los valores de resistencia al movimiento medidos mediante unos sensores de contacto, los cuales son almacenados en una base de datos, La principal aportación es la toma de decisiones del sistema para la ejecución adecuada de la rutina de fisioterapia.
Palabras clave: Fisioterapia, Rehabilitación, Exoesqueleto, Mano, Rutina
There are several traumas that generate a motor deficiency and require a personalized rehabilitation physiotherapy and continuous monitoring of its evolution. The intelligent exoskeleton for hand physiotherapy will be able to make decisions based on the values of resistance to movement measured by contact sensors, which are stored in a database. The main contribution is the decision making of the system for the proper execution of the physiotherapy routine.
Palabras clave: Physiotherapy, Rehabilitation, Exoskeleton, Hand, Routine
Podemos realizar casi cualquier actividad utilizando nuestro cuerpo. El movimiento es inherente a cualquier actividad que realicemos y esto nos permite tener un buen desempeño en cualquier sociedad. Realizamos tareas de diversa índole y, en particular, las manos nos ayudan a realizar tareas increíblemente precisas como escribir, desarrollar manualidades e incluso a poder expresarnos con los ademanes que acompañan las palabras que expresamos. Pero también, en contraparte, nos encontramos expuestos a sufrir algunas lesiones que afectan la movilidad y nuestra capacidad para desenvolvernos de forma natural.
Con datos de la Asociación Mexicana de Fisioterapia, en el país sólo existen 3 mil fisioterapeutas con cédula profesional. Comparando este dato con el número de personas con discapacidad, que de acuerdo con el INEGI rebasan los 5 millones, nos daremos cuenta de la gran importancia que toma esta profesión actualmente en nuestra sociedad. [1]
En la actualidad, la tarea de los fisioterapeutas es ofrecer un tratamiento para la recuperación o rehabilitación de lesiones en los pacientes y mejorar su calidad de vida. Un fisioterapeuta examina al paciente, identifica las áreas con dolor en los músculos, tendones y ligamentos para determinar el procedimiento con las sesiones para lograr la recuperación parcial o total de la movilidad en los pacientes con lesiones.
La robótica es la ciencia que se ocupa del estudio, desarrollo y aplicaciones que tienen los robots. Los exoesqueletos son estructuras usadas sobre el cuerpo humano que sirven como apoyo y se usan para asistir los movimientos y/o aumentar las capacidades del cuerpo humano. La mayoría de exoesqueletos, se adaptan al cuerpo con sistemas inteligentes, sensores y motores que permiten la ejecución de alguna función para realizar una tarea. [2]
En esta área, se han reportado trabajos con exoesqueletos de manos para ejecutar tareas de rehabilitación y otros donde se dan datos de fuerza requerida para realizar tareas de la vida cotidiana. Vea Fig. 1. [3] [4]

Figura 1. Ejemplos de exoesqueletos de mano
En la sección 1 de este trabajo, se muestra el estado del arte de trabajos realizados con exoesqueletos de mano, en la sección 2 se presenta la metodología para la obtención de la rutina a ejecutar en la sesión de fisioterapia. En la sección 3 se presentan los resultados encontrados y al final se muestran las conclusiones y trabajo futuro.
El uso de un exoesqueleto de mano debe tener una metodología propia y particular que atienda las necesidades particulares para las que fue diseñado.
2.1 Modelo de Interacción del exoesqueleto de mano
El exoesqueleto inteligente para fisioterapia, integra 4 componentes. El primero es el guante con sensores (para obtener los valores de las variables) y con motores para ejecutar la rutina que se ha obtenido. El segundo componente es el dispositivo de control del guante, el tercer componente es el software de control con el que el fisioterapeuta interactúa. El cuarto componente es la Base de datos con los perfiles de usuario que contiene los datos de las variables por usuario y por sesión. Vea Fig.2.

Figura 2 Modelo de interacción de componentes del Sistema.
2.2 Proceso de uso del exoesqueleto inteligente para fisioterapia
El proceso que se lleva a cabo desde la colocación del guante con sensores en el paciente. Inicialmente, se lee el estado actual de los valores de ángulo y presión con el guante. Por otro lado, el software accederá en la base de datos al perfil del paciente y permitirá crear una nueva sesión. Se inicia la ejecución de la rutina actual y al terminar se guarda el historial con los valores del progreso alcanzado. Para finalizar se retira el guante y estará listo para atender un nuevo paciente. Vea Fig. 3
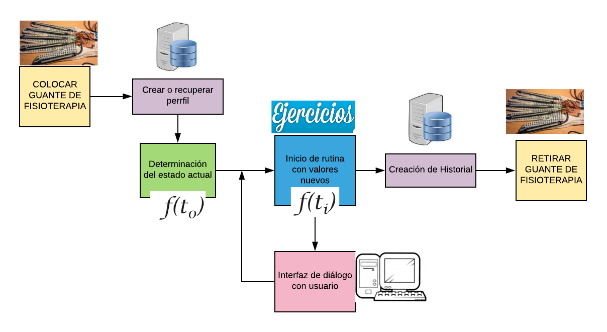
Figura 3. Proceso de uso del exoesqueleto inteligente para fisioterapia
Una vez colocado el guante, el sistema verifica en la base de dato si el perfil de paciente existe, y si no, crea un registro nuevo. Se procede a recuperar los datos de la última sesión y a hacer una lectura del estado actual con el guante, para posteriormente ejecutar la rutina y guardar los datos alcanzados del paciente en su historial. Ver Fig. 4.

Figura 4. Proceso de validación y generación de rutina
La metodología incluye un algoritmo que corrige la rutina a ejecutar con el paciente, en función de variables que se validan en el sistema y que deben pertenecer a un rango válido. La ejecución de la rutina cambia si detecta valores que no se encuentran dentro de los establecidos. Vea Fig. 5.
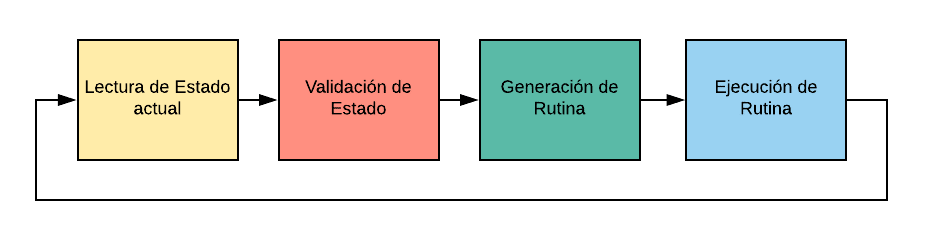
Figura 5: Proceso de validación y generación de rutina
Los sensores, por medio de una rutina de lectura de estado actual, nos darán los valores de presión y ángulo de los dedos. Durante la ejecución de la rutina, y después de cada acción en el guante, el sistema mostrará en pantalla un mensaje al usuario para saber si desea continuar con la ejecución de la rutina, en caso afirmativo, se continúa con la rutina, y en caso negativo se guarda en el historial de paciente los últimos valores alcanzados. Vea Fig. 6.
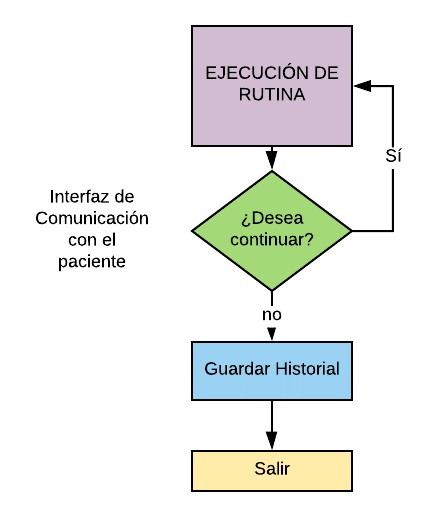
Figura 6. Interacción con el Paciente
En la gráfica se muestra que el sistema debe responder a estados de la mano y corregir estabilizando el guante después de encontrar un valor fuera del rango. La curva superior corresponde a la lectura de sensores del guante, mientras que la curva inferior muestra la señal de control para el sistema electromecánico. En el punto 15 fue generada, en software, un valor fuera de rango para observar si el sistema corrige como se espera. Vea Figura 7.
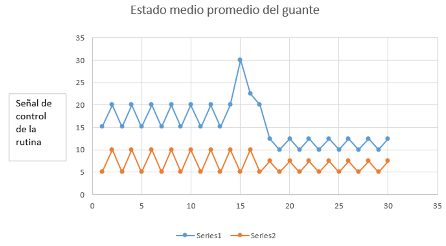
Figura 7. Gráfica con estabilización de valores después de encontrar valores fuera de rango en la ejecución de la rutina
El sistema mide cambios en la presión del guante y para evitar lesiones es capaz de disminuir la velocidad y ángulo de movimiento. Como trabajo futuro se espera que el sistema no requiera calibración, y aprenda del historial que es generado en base a ejercicios con el fisioterapeuta.