
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 2, 2019
En el campo de la podología, muchas de las disfunciones del pie se generan debido a malformaciones congénitas, accidentes o mal uso del calzado. Para el tratamiento o la prevención de dicha malformación se deben realizar medidas sobre el pie y el sistema que realice dichas medidas debe ser confiable, rápido y debe almacenar sistemáticamente la información, permitiendo al ortopedista realizar una valoración y un seguimiento detallado de la misma. Como solución, se propone el diseño e implementación de un modelo funcional que, a través de métodos ópticos y triangulación láser, permita obtener la reconstrucción tridimensional de pies humanos y posteriormente realizar medidas sobre el mismo.
Palabras Claves: metrología, podología, reconstrucción tridimensional
In the field of podiatry, many of the dysfunctions of the foot are generated due to congenital malformations, accidents or misuse of footwear. For the treatment or prevention of this malformation, measurements must be made on the foot and the system that performs these measures must be reliable, fast and must systematically store the information, allowing the orthopedist to make an assessment and a detailed follow-up of it. As a solution, we propose the design and implementation of a functional model that, through optical methods and laser triangulation, allows obtaining the three-dimensional reconstruction of human feet and later performing measurements on it.
Keywords: Metrology, Podiatry, Three-Dimensional Reconstruction
Debido a las características no invasiva, facilidad de implementación, resolución ajustable, rango de medición y campo de observación, los métodos ópticos utilizados para obtener el perfil de la superficie y la medición de forma han encontrado un creciente interés en muchas aplicaciones industriales y médicas. Tradicionalmente, los dispositivos de medición tridimensional que utilizan métodos ópticos están formados por unidades de iluminación activa o pasiva, adquisición y procesamiento de imagen y control que permiten el acceso a imágenes digitales tridimensionales a partir de las cuales se puede llevar a cabo el análisis metrológico del objeto de estudio.
Para obtener información total del objeto de estudio, generalmente se utilizan tres formas de disposición: el método de rotación de objetos [1], la técnica de desplazamiento de unidades de iluminación y adquisición [2] y el enfoque de unidades múltiples de iluminación y adquisición [3]. En la última situación, cada unidad de iluminación/adquisición tiene su propio sistema de coordenadas local, donde todas las coordenadas 3D deben transformarse en un sistema de coordenadas global y unificarse para obtener una imagen digital tridimensional única del objeto escaneado.
Actualmente existen varios dispositivos comerciales que hacen uso de métodos ópticos, para obtener la reconstrucción tridimensional del pie humano, sin embargo, el costo de tales dispositivos sigue siendo muy alto. El objetivo de este trabajo es diseñar y construir un modelo funcional de laboratorio económico, específico para la reconstrucción tridimensional del pie humano a 360° de exploración, el cual proporcione medidas del pie, útiles para la fabricación de calzado apropiado, personalizado.
El diseño de esta herramienta ofrecerá ventajas significativas a la economía del Departamento de Santander, Colombia puesto que una de sus actividades económicas más sobresalientes es el diseño y fabricación de calzado. Razón por la cual, el desarrollo de este proyecto estuvo apoyado por el Servicio Nacional de Aprendizaje – SENA a través de la Red TECNOPARQUE Colombia Regional Santander, Nodo Bucaramanga.
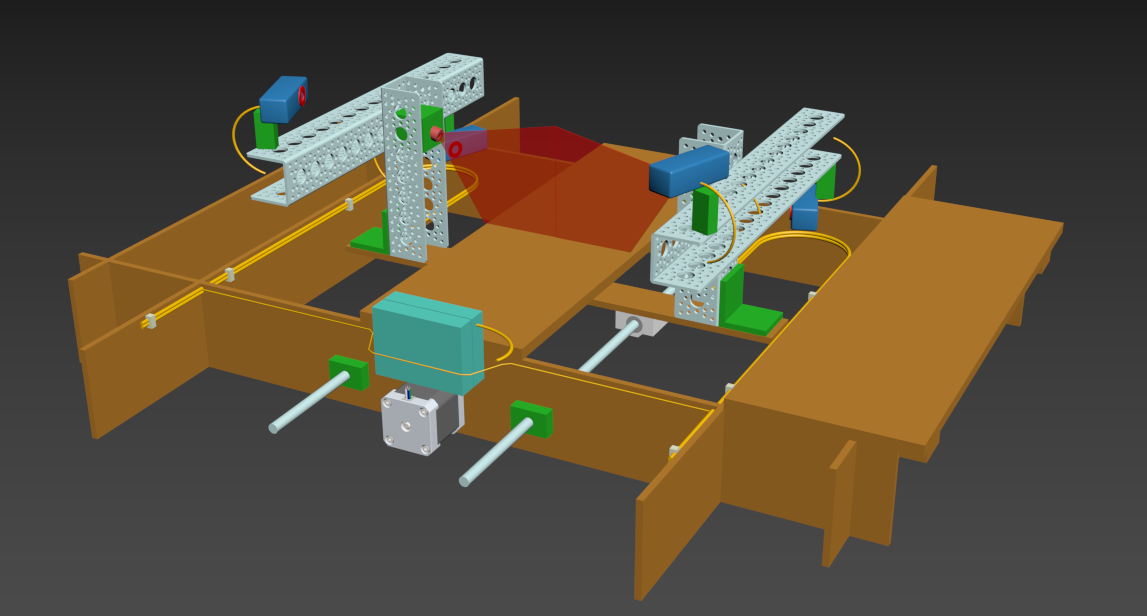
Teniendo en cuenta las características propias de los sistemas de reconstrucción tridimensional, en la Figura 1, se presenta un bosquejo de la propuesta para llevar a cabo la reconstrucción tridimensional del pie humano utilizando la técnica de triangulación láser, en el inciso a) se presenta el modelo CAD, en b) se muestra una imagen del modelo funcional construido y c) presenta un modelo esquemático diseñado para ilustrar la propuesta teórica, donde L1 y L1 hacen referencia a los generadores de línea láser y C1,C2,C3,C4 relacionan las 4 cámaras CCD utilizadas para los sistemas de captura. El pie se pone en contacto con una superficie plana que define el plano de referencia (RP) y el sistema de coordenadas global. El eje del pie es paralelo al eje X y la posición RP corresponde al plano Y=0. Cada uno de los sistemas de iluminación hace uso de un haz láser que se proyecta utilizando un generador de línea láser, para obtener un plano láser perpendicular al eje X, se lleva a cabo un proceso de alineación. Al ubicar el pie sobre RP, se obtiene una línea curva debida a la intersección de la forma del pie con el plano láser. Las cuatro cámaras CCD se colocan alrededor del eje X en diferentes posiciones, formando ángulos diferentes respecto al plano láser. Las posiciones de las cámaras CCD y los generadores de líneas láser están optimizados para extraer la mayor parte de la información de la forma tridimensional de la superficie del pie. Dichas posiciones se definen a través de una estructura rígida que se puede trasladar en la dirección del eje X a posiciones conocidas, a través del uso de un motor de desplazamiento lateral. En cada posición X, se adquieren y procesan cuatro imágenes utilizando una interfaz gráfica basada en Matlab ®.
 a)
a) b)
b)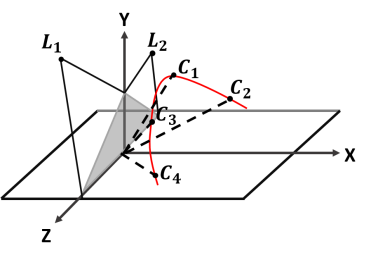 c)
c)Figura 1. Diseño propuesto presentado: a) modelado CAD, b) implementado físicamente y c) esquemático
Es importante notar que cada una de las piezas utilizadas en el ensamble del modelo funcional, fueron diseñadas particularmente para el proyecto y fabricadas haciendo uso de una impresora tridimensional.
De acuerdo a la disposición de los sistemas de captura, cada cámara CCD explora una región del plano láser, dependiendo de su campo de visión. De esta forma, cada cámara CCD y su sección de plano láser definen un dispositivo clásico de triangulación láser. De acuerdo con el principio de triangulación láser, al proyectar un plano láser sobre una superficie se produce una línea deformada que aparece distorsionada desde la perspectiva de la cámara y se puede utilizar para una reconstrucción geométrica de la forma de la superficie tridimensional. Usando la ley de Gauss para lentes delgadas y la Figura 2, se puede establecer la ecuación 1 que representa la relación entre el valor de la coordenada Z de un punto en la superficie y los parámetros experimentales del esquema de triangulación láser:
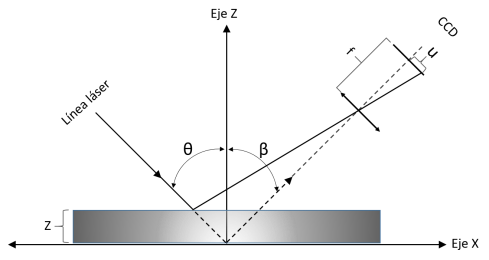
Figura 2. Esquema de triangulación láser
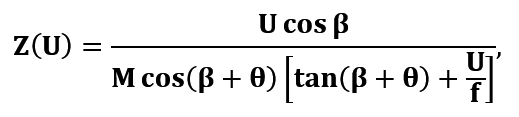
donde M=f/d0, siendo f la distancia focal efectiva del objetivo de la cámara y d0 la distancia desde el origen del sistema de referencia hasta el centro del sistema óptico del objetivo. Utilizando la ecuación 1 se obtiene la altura del objeto para los puntos digitalizados de su superficie, donde U se obtiene realizando un procesamiento digital a la imagen capturada con cada CCD.
El error que se introduce en el cálculo de la altura es determinado principalmente por la precisión al medir los parámetros del sistema: θ,β,f, d0 Por lo tanto, es necesario buscar, otra estrategia para convertir las coordenadas en píxeles de la línea láser a altura en milímetros.
Debido a la dificultad para medir los parámetros, en el experimento se puede establecer una relación entre la posición del píxel en la imagen y la altura de la coordenada Z. Tradicionalmente, esta ecuación experimental se obtiene usando una superficie plana ubicada de forma paralela al plano Z = 0 la cual se desplazada a intervalos regulares conocidos. Como las coordenadas de píxeles de la línea recta de la imagen capturada, es función del valor de posición Zdel plano superficie, cada posición de píxel en el plano de la imagen tiene un valor Z asociado. En la Figura 3 se muestra la secuencia de posiciones de la línea de láser compiladas en una imagen para diferentes valores Z usando una cámara CCD, donde la superficie plana fue desplazada entre -80mm a 80mm cada 5mm, después de llevar a cabo el procesamiento digital.
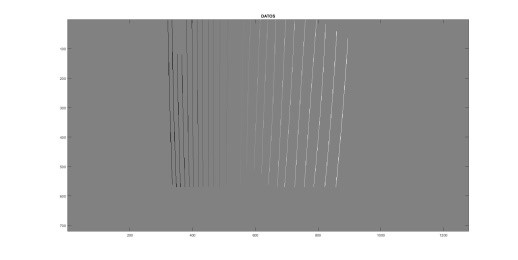
Figura 3. Curva de calibración
Si a toda la información obtenida se le lleva a cabo un ajuste polinómico se puede calcular el valor de Z a través de la ecuación 2, la cual permite obtener para cualquier posición de píxel en el plano de la imagen (u,v), su coordenada asociada en Z:

Por tanto, la ecuación 2 define la curva de calibración del dispositivo de triangulación láser, de acuerdo a ello, cada cámara CCD tiene su propio conjunto de coeficientes, los cuales se calculan de forma independiente y permiten obtener el valor Z de cualquier punto de píxel de la línea láser adquirida por la cámara CCD. La Figura 4 muestra la curva de calibración interpolada al evaluar el polinomio anterior en el rango de valores (u,v) adquiridos. De esta manera a cada punto de la imagen que tiene coordenadas en píxeles le corresponde una altura Z en milímetros.
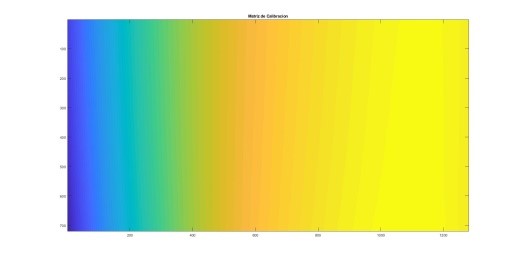
Figura 4. Curva de calibración interpolada
El procedimiento de reconstrucción tridimensional consiste en calcular las coordenadas de los puntos centrales de la línea deformada por la topografía del cuerpo y calcular sus correspondientes alturas usando la curva de calibración.
Para convertir las coordenadas en píxeles del plano imagen a milímetros en el plano objeto se suele utilizar el factor de ampliación geométrico del sistema formador de imagen, siempre que el eje óptico sea perpendicular al plano de referencia y el sistema formador de imagen no presente distorsiones geométricas considerables. Si no se cumple ninguna de las anteriores condiciones, se debe recurrir a estrategias de calibración de cámaras que consideran la posición espacial de la cámara y la influencia de distorsiones geométricas. El proceso de calibración de cámaras consiste en determinar la geometría y características internas de la cámara: parámetros intrínsecos (coordenadas del punto principal, distancia focal, etc.), y los parámetros extrínsecos (rotación y translación) que representan la localización y orientación de la cámara relativa al sistema de coordenadas del objeto. Estos parámetros normalmente son calculados usando un patrón de calibración que contiene rasgos fácilmente detectables en la imagen capturada.
Existen enfoques diferentes para calcular los parámetros intrínsecos y extrínsecos, en este trabajo el procedimiento de calibración se llevó a cabo utilizando el toolbox de calibración de cámaras de Matlab ampliamente utilizado en la comunidad de visión por computador. Una vez determinados dichos parámetros para cada CCD respecto al plano de trabajo, se pueden determinar estrategias que permitan unificar los sistemas de coordenados logrando así, obtener información a 360° de observación.
Con el fin de llevar a cabo la unificación de la información capturada de manera independiente, por cada uno de los sistemas de captura, se hizo uso de una técnica clásica que consiste en capturar la imagen de un objeto conocido el cual contiene una marca diferenciable para cada uno de los sistemas de captura, a través de las cuales se aplican rotaciones y traslaciones que permitan superponer la información obtenida. Una vez implementado el proceso de calibración del espacio de trabajo, las cámaras utilizadas y el proceso de unificación de la información tridimensional capturada a partir de cada una de las cámaras CCD utilizadas, en la Figura 5, se presentan imágenes a partir de múltiples vistas de un pie humano reconstruido.
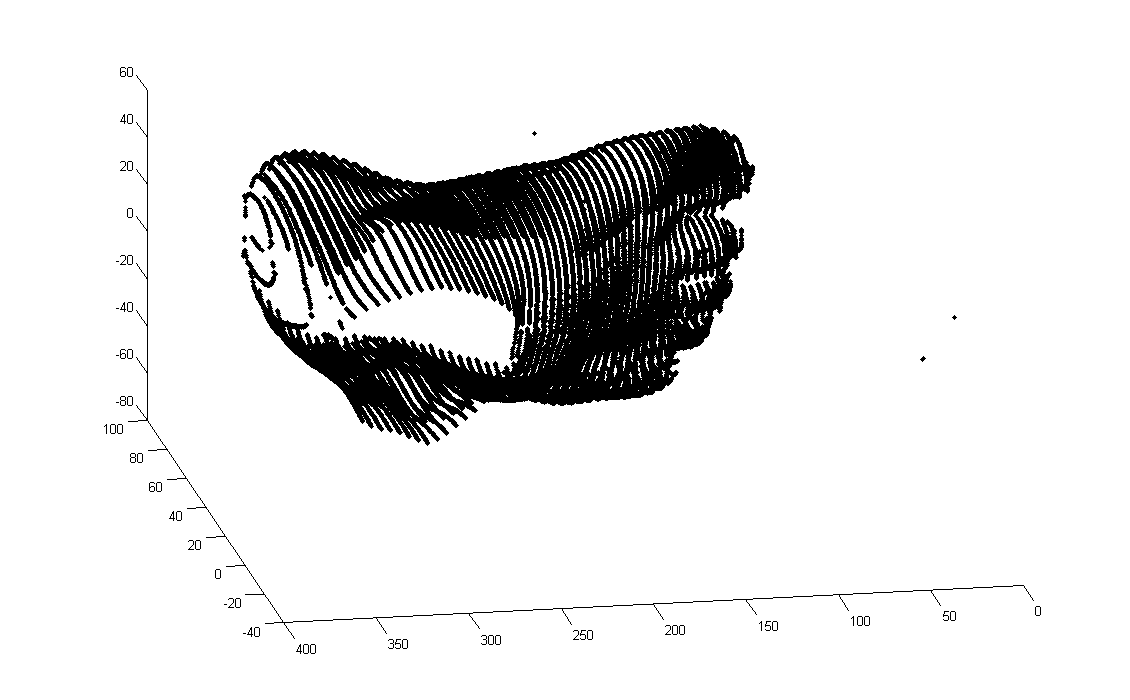
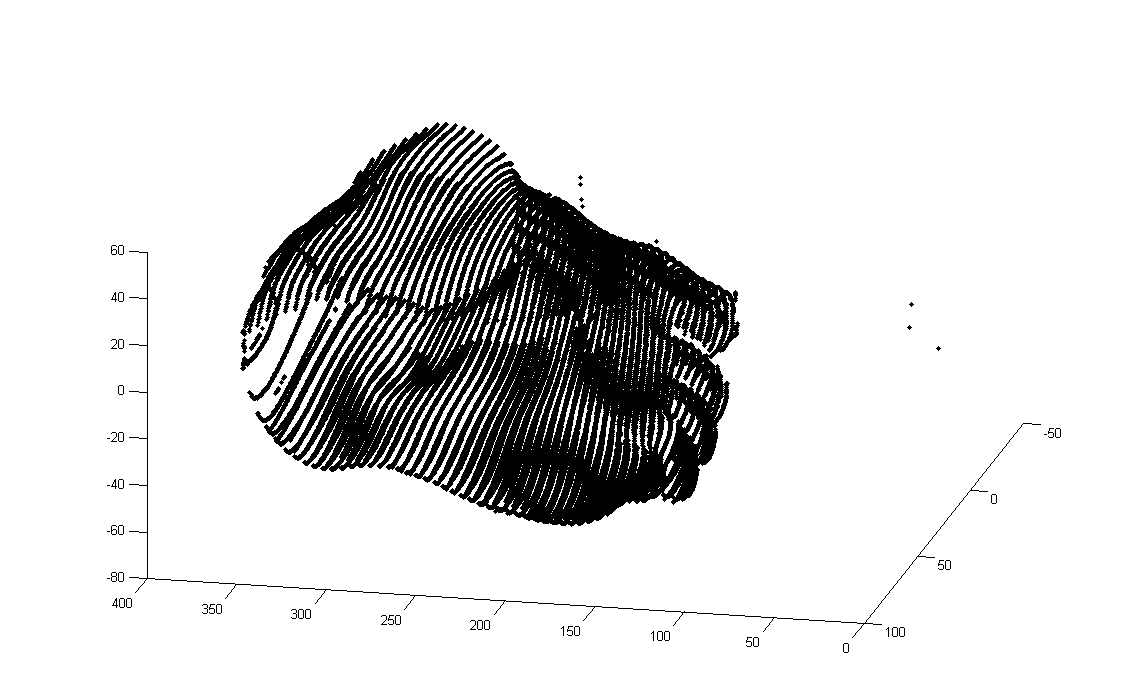
Figura 5. Múltiples vistas de la reconstrucción tridimensional de un pie humano