
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 4, 2022
En el presente trabajo, se muestra el diseño y construcción de un robot manipulador que permite realizar de forma remota la tarea de la manipulación y control de los Residuos Peligrosos Biológicos e Infecciosos (RPBI). Primeramente, se muestra el uso del software Fusión 360, en este software se diseñan las piezas necesarias para los eslabones, bases y efector final del prototipo, debido a que la tarea es apoyar la clasificación y control de RPBI, el prototipo a construir es un brazo robótico de 4 grados de libertad (GDL) con un efector final o herramienta tipo pinza garra de 2 dedos. Terminado el diseño se realiza la impresión de los elementos de ensamble en material PLA para construir el brazo robótico. Para el control del brazo robótico se diseña el circuito electrónico que le da la energía necesaria a los motores y las señales pertinentes para su control.
Palabras Claves: Manejo de RPBI, Brazo Robótico, Robot Manipulador
In the present work, the design and construction of a manipulator robot that allows remotely carrying out the task of handling and controlling Biological and Infectious Hazardous Waste (RPBI) is shown. First, the use of the Fusion 360 software is shown, in this software the necessary parts for the links, bases and final effector of the prototype are designed, because the task is to support the classification and control of RPBI, the prototype to be built is a 4-degree-of-freedom (DOF) robotic arm with a 2-finger claw gripper tool or end effector. Once the design is finished, the assembly elements are printed in PLA material to build the robotic arm. For the control of the robotic arm, the electronic circuit that gives the necessary energy to the motors and the pertinent signals for its control is designed.
Key Words: Handling of IBHW, Robotic Arm, Robot Manipulator
En el ámbito de la salud, se cuenta con un área destinada a la manipulación y control de los residuos peligrosos biológico-infecciosos (RPBI). El personal encargado de esta área, son capacitados para llevar a cabo los procesos para el desecho de los RPBI bajo la normativa NOM-087-ECOL-SSA1-2002 [1], para la correcta eliminación de estos. Sin embargo, no se está exentos de cometer errores y llegar a olvidar algún paso del protocolo o incluso cometer un descuido. Debido a esto, la inserción de la tecnología para el apoyo en esta tarea es indispensable.
El trabajador de la salud se encuentra expuesto a diversas infecciones en el ambiente hospitalario, por lo que debe adherirse a los programas de prevención y control. Una manera de prevenir la adquisición de infecciones ocupacionales por parte del trabajador de la salud es la correcta eliminación de los RPBI. Todas las personas expuestas al RPBI corren riesgo de contaminarse por una exposición accidental o un mal manejo de los residuos e infectarse a través de grietas, cortes de piel, absorción en las membranas mucosas o lesiones con objetos punzocortantes contaminados. Por lo anterior, mientras menos expuesto se encuentren las personas a agentes infecciosos es mejor para su salud, e incluso para personas dentro del ambiente laboral que no están directamente en contacto con tales agentes peligrosos.
En la actualidad, debido a la contingencia ocasionada por la pandemia del COVID-19, los desechos RPBI incrementaron rápidamente. Según datos del Instituto Nacional de Ecología y Cambio Climático se estima que para los primeros 6 meses de la pandemia, aproximadamente hasta julio de 2020, habría un incremento del 3.3 al 16.5% en la cantidad de RPBI, esto debido a los recursos necesarios para prevenir la propagación del COVID-19 por la contingencia [2].
Actualmente, dentro del mundo de la automatización industrial, la robótica ha sido pilar para el desarrollo de múltiples actividades. Debido a sus características el robot antropomórfico o robot manipulador es el modelo más versátil en múltiples aplicaciones, esto por sus tres principales articulaciones de tipo rotacional. Se llama antropomórfico porque simula los movimientos de un brazo humano [3]. Este robot posee gran accesibilidad y maniobrabilidad en su espacio de trabajo, un ejemplo de este se aprecia en la Figura 1.
En el área médica, la robótica se encuentra involucrada ampliamente, ejemplo de esto son los robots de cirugía. Sin embargo, un área desatendida es el manejo de RPBI. Debido a la naturaleza de sus características infecto-contagiosas, estos residuos representan un riesgo para la salud, por lo tanto, su manejo y control adecuado representa un problema a solucionar [4].
Según la Norma Oficial Mexicana NOM-087-ECOL-SSA1-2002, Protección ambiental-salud ambiental-residuos peligrosos biológico infecciosos-clasificación y especificación de manejo, podemos clasificar estos residuos de acuerdo a cinco categorías [1]: sangre y sus componentes sólo en su forma líquida, cultivos y cepas de agentes biológico infecciosos, patológicos, residuos no anatómicos y objetos punzocortantes.
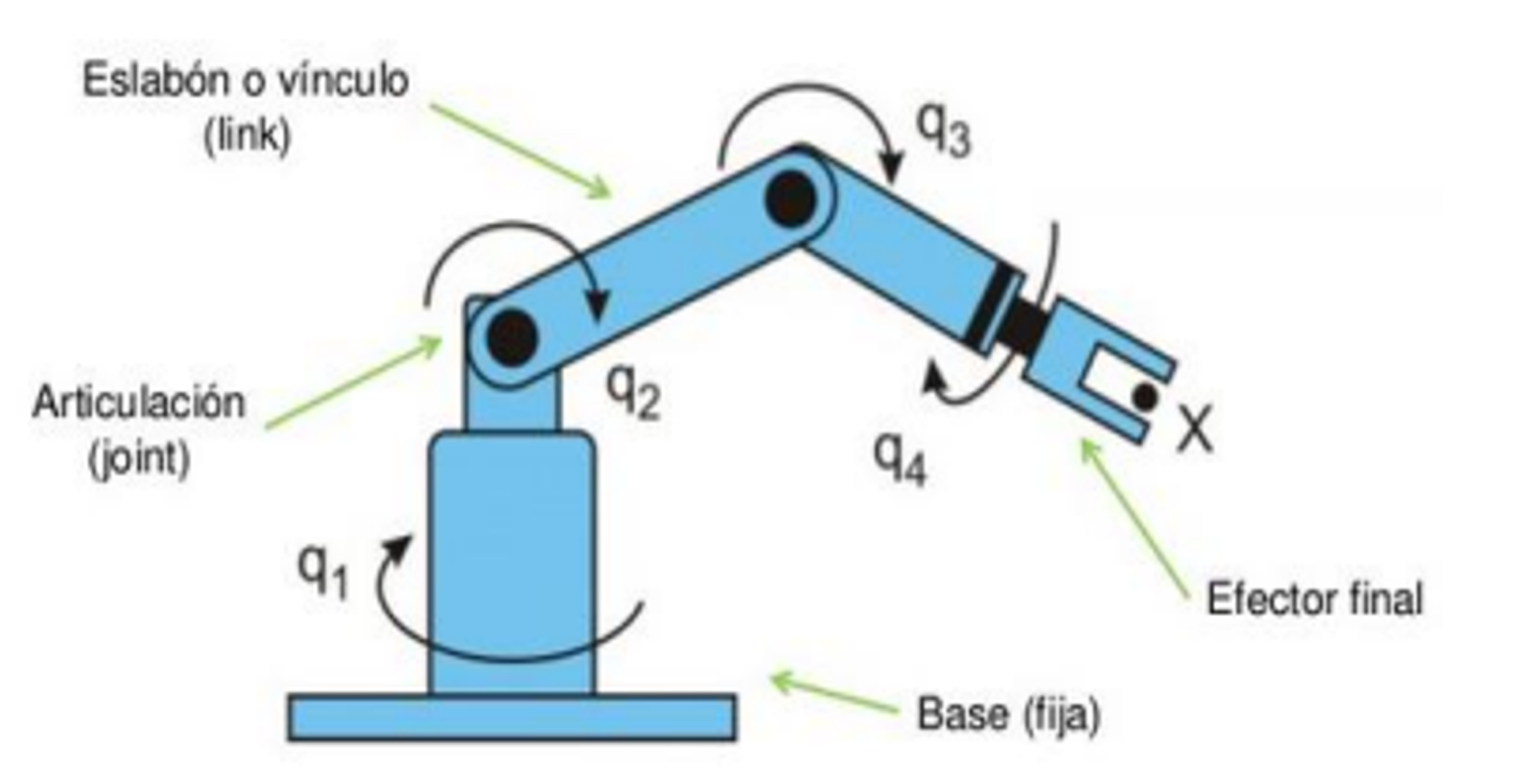
Figura 1. Estructura básica de un robot manipulador
Actualmente, para la realización de actividades industriales, tales como la clasificación de objetos, recolección, sujeción, etc., existen diversos robots manipuladores, de los cuales se pueden mencionar los siguientes:
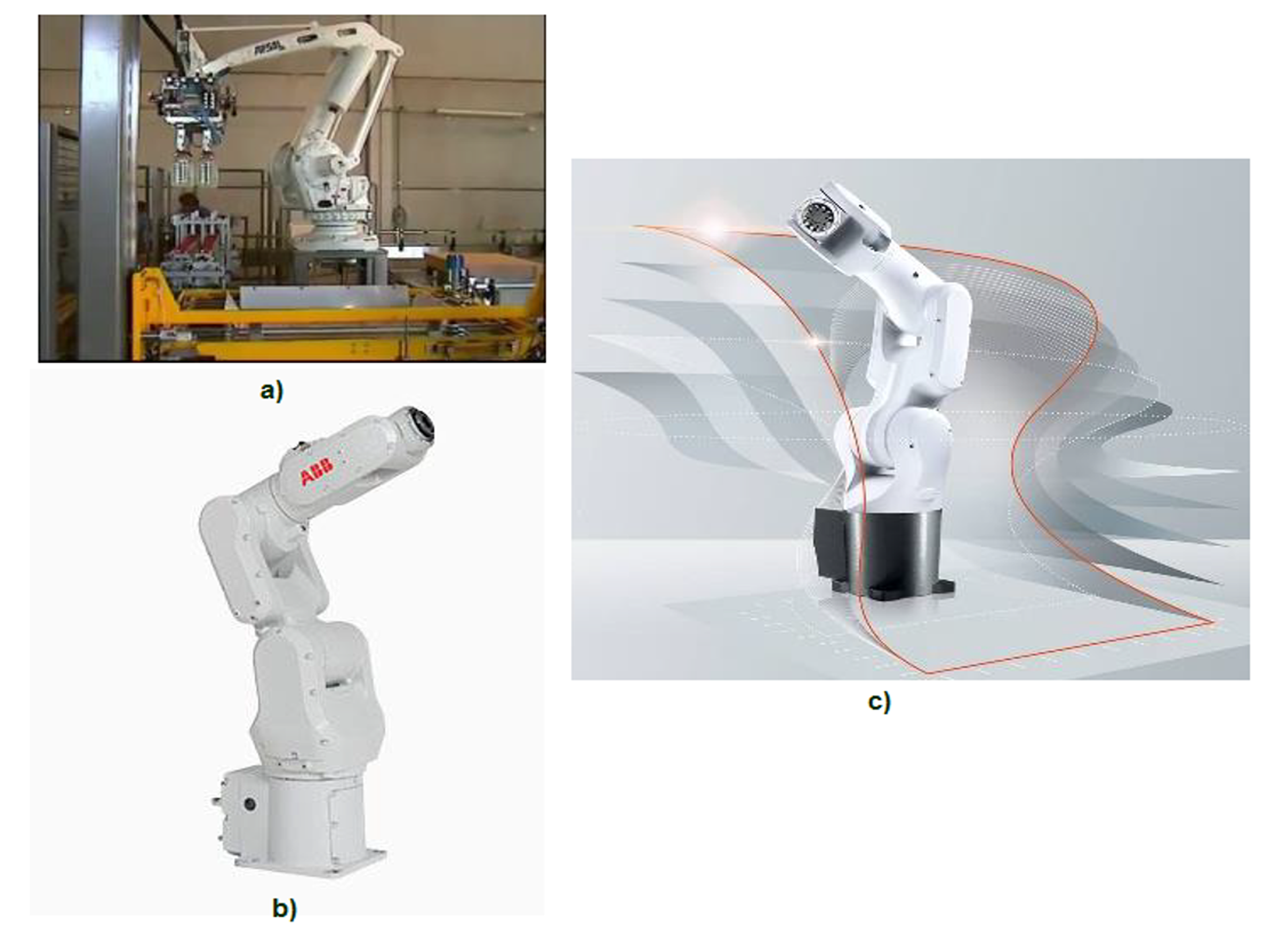
Figura 2. Robots manipuladores de uso industrial. a) Robot RP40 Tecnoco, b) Robot KUKA KR 4 AGILUS, c) Robot ABB IRB 1100
3.1 Planteamiento del Problema
La manipulación de residuos peligrosos conlleva a un riesgo a la salud de quien se encuentra en contacto, sobre todo cuando el individuo no se encuentra debidamente capacitado e incluso si se encuentra en problemas de estrés laboral, cansancio o relacionados, aun problemas de no contar con el equipo necesario para protección e integridad de la salud física que lleven a no trabajar correctamente. Por lo tanto, resulta necesario el implementar un dispositivo que imite los procesos que lleva a cabo un especialista en el área de manipulación de Residuos Peligrosos Biológico Infecciosos para así, disminuir el contacto constante a estos agentes peligrosos.
3.2 Solución Propuesta
El estar en contacto con residuos biológicos infecciosos conlleva un gran riesgo a la salud tanto de las personas que tratan con ello de manera directa e indirecta, si se disminuyera el contacto el riesgo se vería reducido, de ahí la necesidad de proporcionar a los especialistas en salud que se encuentren en contacto con agentes biológico infecciosos un dispositivo con el cual se manipulen estos residuos a distancia. Las características son:
3.3 Construcción del brazo robótico
Para el diseño del robot, se utilizó material de impresión 3D PLA el cual es el más común, este material presenta alta rigidez, alta resistencia a la tracción y flexión, además es un termoplástico biodegradable para creación de prototipos de bajo coste [8]. Realizando ensayos de dureza Rockwell de 60 kg con punta cónica se obtiene una resistencia a la compresión de 71 MPa, ante el medio ambiente la corrosión es nula, sin embargo, ante agentes corrosivos la degradación crece exponencialmente cuando el agente penetra la pieza. El diseño utilizado que se imprimió es el mostrado en la Figura 3, el cual, se pretende pueda manipular un máximo de 100 g, lo que representa aproximadamente un total de 20 residuos entre jeringas y cubrebocas.
Para el control de cada articulación en el brazo manipulador se utilizan servomotores. Un servomotor es un actuador rotativo o motor que permite un control en términos de posición angular. Para determinar el motor adecuado a implementar se debe de tomar en cuenta el peso que cargará cada uno de ellos, tomando como crítico el que se encuentra en la base del mismo, esto porque será el que más peso debe cargar debido a que soportará toda la estructura del robot. Considerando la extensión máxima de 50cm del robot prototipo y el peso deseado a soportar de 100 g, se tiene que la fuerza del servomotor debe ser 5000 gf x cm, por ello se decidió utilizar servomotores MG995 cuyas características son superiores a las requeridas.
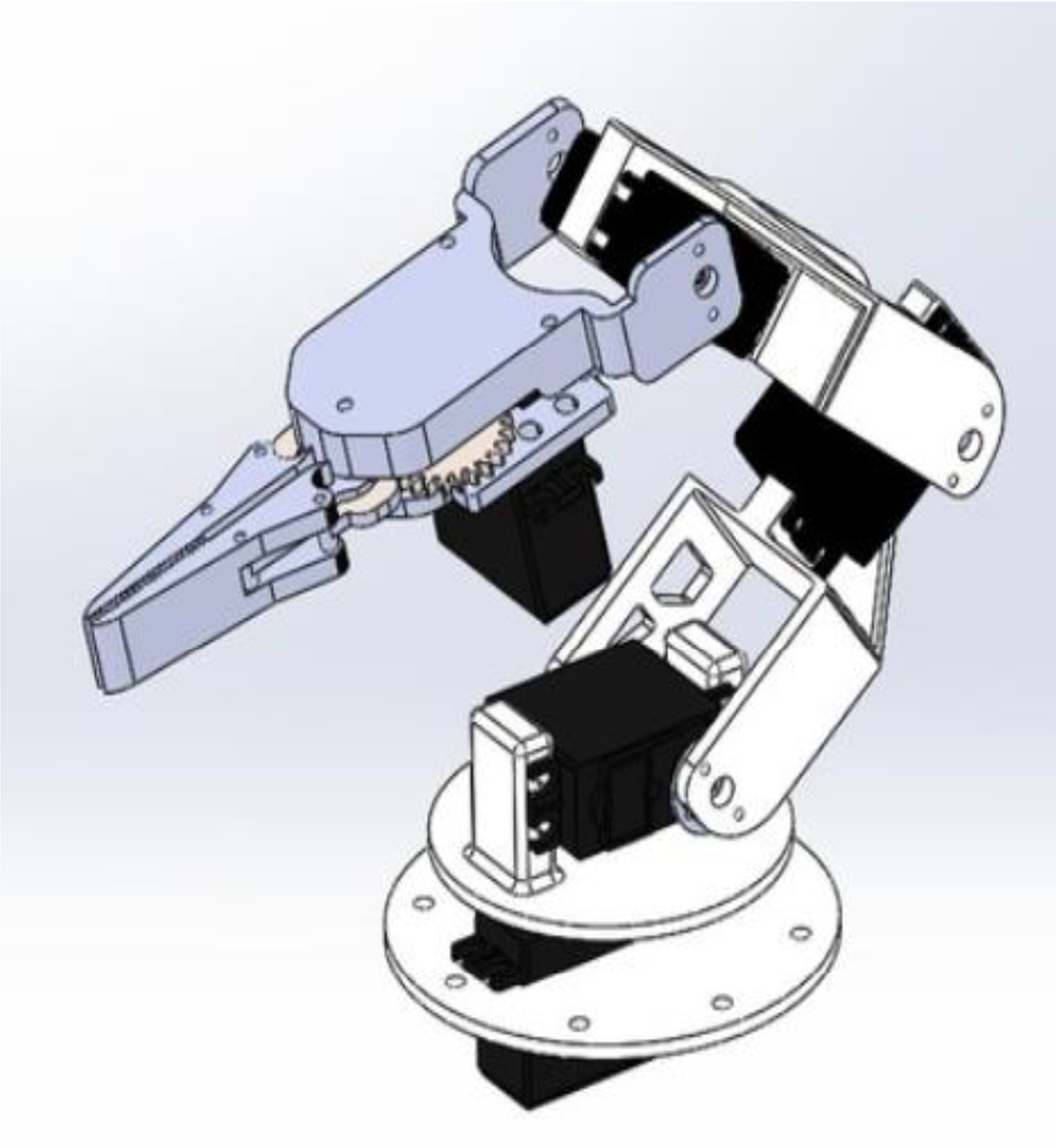
Figura 3. Robot manipulador implementado
Para el control se optó por utilizar un módulo joystick, estos cuentan con tres señales, una señal para el eje X, otra para el eje Y, por último, una señal que controla un switch que se encuentra como un botón. Un joystick no es más que una palanca conectada a dos potenciómetros el cual, en este prototipo se encontrará conectado eléctricamente al robot manipulador por medio de cables, los cuales brindarán una distancia de trabajo de 80 cm, sin embargo, pude ser implementado un módulo de bluetooth o wifi para controlarlo a mayor distancia. Los potenciómetros están ubicados tal que uno permite conocer la inclinación de la palanca en el eje x mientras que el otro permite conocer la inclinación en el Y. Los pines VRx y VRy están conectados a divisores de tensión que forman los potenciómetros. Por lo cual cuando inclinamos la palanca los potenciómetros giran y el voltaje de los pines cambia.
Como cerebro de todo el sistema se utilizó un Arduino uno el cual se programa, para ello este cuenta con su propio software, es de fácil comprensión y cuenta con librerías específicas para controlar los servos y leer los datos arrojados por el módulo joystick.
El robot cuenta con 4 ejes de libertad y un elemento de agarre, por cual, con un solo joystick seria complejo mover los 4 servomotores de los desplazamientos angulares y un quinto que permite abrir la garra al mismo tiempo, así que se realizó un sistema para controlar 2 servos a la vez, con el joystick, uno de derecha a la izquierda y otro de arriba abajo, y con ayuda del switch central del joystick, un sistema de indicación para saber que servomotores son los que están activos. Utilizando el switch que se encuentra en el módulo joystick se cambiará la activación de los servomotores.
3.4 Resultados
Como resultados obtenidos en el desarrollo del dispositivo se tiene el robot impreso en 3D, mostrado en la Figura 3, con las siguientes características: tiene una dimensión máxima de alcance de 50 cm y soporta hasta 150 g, además de 4 grados de libertad (GDL) con un efector final o herramienta tipo pinza garra de 2 dedos, este se observa en la Figura 4.

Figura 4. Robot manipulador obtenido en físico
Como base se usó una tabla de madera donde van todos los componentes que no se encuentran directamente en el robot como lo son el Arduino, el módulo joystick y el sistema de indicación para el control de los servos, así como las conexiones de alimentación de los servos.
A continuación, en la Figura 5, se muestra el código de programación que se utilizó, por el momento no se entró en detalles de posiciones específicas que se desean llegar, simplemente al mover el joystick en un eje se mueve el servo indicado un grado por cada vez que se encuentre en una posición mayor a 1000 o menor a 200, la presentación del código sirve como referencia para futuros trabajos en el área.
Por el momento se encuentra con un control por joystick, es muy sencillo de controlar, sin embargo, para llegar a una posición especifica se pasa por varios cambios de control de los servomotores, en un futuro se implementará un control diferente que se encuentra en desarrollo, el cual se espera mejore este control.
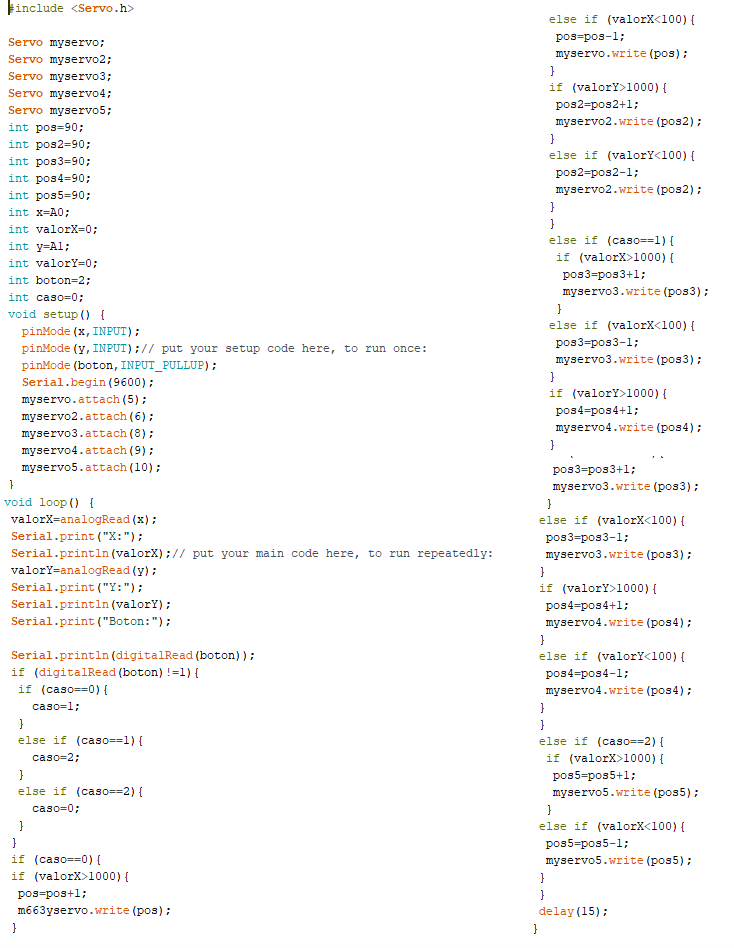
Figura 5. Código de manipulación del brazo robótico
Se ha obtenido un robot manipulador con 4 grados de libertad implementando la tecnología de impresión 3D, lo cual, permite el prototipado rápido, así mismo, se logra realizar un control el cual es implementado por medio de joystick para manipular todos los grados de libertad del robot, en este momento se encuentra atado físicamente por cables, pero puede ser implementado con tecnología inalámbrica.
Con el desarrollo de este prototipo de robot manipulador a escala controlado por joystick y que permite la manipulación de residuos, se puede concluir que es viable que esta metodología permita crear un robot, con la tecnología adecuada, para el área de residuos peligrosos biológico infecciosos y con ello posiblemente disminuir el porcentaje de personas infectadas por algún agente infeccioso; cualquier hospital cuenta con esta área por lo que beneficiaría a muchas personas el implementar este dispositivo, sin embargo, para no comprometer a los trabajadores en su trabajo se les capacitaría para el uso de este dispositivo así no reemplazarías a estas personas, es por ello que se pensó en que utilizara un control manual y no realice de manera automática este trabajo.