
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 6, 2024
En este proyecto presentamos un exoesqueleto robótico, para asistir en los tratamientos fisioterapéuticos en los brazos, enfocándonos específicamente en la articulación del codo. Se diseñó un prototipo capaz de replicar los movimientos, observamos la movilidad que tiene esta articulación en ejercicios fisioterapéuticos instruidos por profesionales a pacientes con problemas de movilidad en brazos, como lo pueden ser la distrofia muscular o parálisis. Nuestro sistema mejora la eficiencia de la fisioterapia, emulando con exactitud los ejercicios propuestos por el fisioterapeuta utilizando una red de sensores que registran sus movimientos, para posteriormente procesarlos y enviarlos al exoesqueleto robótico colocado en el paciente.
Palabras claves: exoesqueleto, fisioterapia, tratamientos
In this project we present a robotic exoskeleton to assist in physiotherapeutic treatments in the arms, focusing specifically on the elbow joint. To design a prototype capable of replicating the movements, we observed the mobility of this joint in physiotherapeutic exercises instructed by professionals to patients with arm mobility problems, such as muscular dystrophy or paralysis. Our system improves the efficiency of physiotherapy, accurately emulating the exercises proposed by the physiotherapist using a network of sensors that record their movements, to later process them and send them to the robotic exoskeleton placed on the patient.
Key words: exoskeleton, physiotherapy, treatments
Los tratamientos fisioterapéuticos suponen un gran porcentaje del total de procedimientos de rehabilitación del país, tomando como referencia diversas encuestas realizadas por el Instituto Nacional de Estadística y Geografía (INEGI), dirigidas y enfocadas a los procedimientos en medicina de tratamiento, de un total de 2 924 214 de personas, el 15% acudieron por fisioterapia y un 14% por rehabilitación [1].
Pero estos datos no solo se ven reflejados en México, este es un problema que está en todo el mundo según datos de la Organización Mundial de la Salud (OMS), existen casi 200 millones de personas que tienen alguna discapacidad, de estas, el 80% tiene problemas al acceso de los servicios de rehabilitación [2]. Lo que ocasiona que millones de personas no puedan recibir los tratamientos necesarios para su rehabilitación. Estos no son los únicos factores que se ven involucrados en la baja eficacia de los tratamientos fisioterapéuticos, también hay otros factores que limitan la efectividad, de los cuales podemos destacar las limitantes que derivan de la falta de conocimientos de los pacientes respecto a los procedimientos de su tratamiento, además de interpretaciones equivocadas de las instrucciones dadas por los profesionales fisioterapeutas.
Por lo tanto, el objetivo de este proyecto fue diseñar un exoesqueleto robótico que asista en tratamientos fisioterapéuticos, identificando los movimientos realizados por el fisioterapeuta, mediante una red de sensores acoplados a su articulación y enviar los datos registrados de cada uno de los movimientos, esto con el fin de lograr que los pacientes puedan replicar con exactitud los ejercicios indicados por el profesional.
De acuerdo con José Patricio Bispo Júnior, la fisioterapia es una disciplina de la salud que se encarga de estudiar, diagnosticar, prevenir y tratar dolencias o malestar. La fisioterapia es un método alternativo al uso de sustancias químicas. Esta diciplina es usada principalmente en procesos de rehabilitación o readaptación de pacientes que hayan presentado traumas físicos o que se encuentren en recuperación tras una cirugía [3].
Basándonos en las recomendaciones de los fisioterapeutas profesionales e investigaciones realizadas encontramos diferentes técnicas y tratamientos que se utilizan para ayudar a la recuperación de pacientes con lesiones, por ejemplo, la realización de ejercicios repetidos 10 veces en una posición determinada de la palma respecto al codo es de gran ayuda para la rehabilitación del paciente [4].
Según Lina Marcela Tapias Urrego uno de los factores que influye en la adherencia de los pacientes a los tratamientos están relacionados a la disponibilidad del propio individuo, además de la cooperación de él y su entorno cercano, como lo pueden ser, familiares o tutores, sin embargo, otras cosas pueden influir, como el nivel socioeconómico [5].
Para poder llevar a cabo la parte experimental, se realizó con anterioridad una serie de investigaciones respecto a los tratamientos fisioterapéuticos en brazos, con problemas de movilidad en la articulación del codo. Todo esto con la finalidad de obtener los datos suficientes para realizar el diseño de los prototipos del exoesqueleto robótico y la red de sensores.
En el diseño elegimos estructuras de aluminio, por su resistencia y ligereza, tanto para la red de sensores, como para el exoesqueleto. A continuación, en la figura 1, se señalan las dimensiones de las estructuras del exoesqueleto, como de la red de sensores.

Figura 1: a) Estructuras del exoesqueleto, b) Estructuras de la red de sensores
Para el exoesqueleto se seleccionó un servomotor MG995 de 15 kg, el cual consideramos suficiente para realizar los movimientos de la articulación del codo, mientras que en la red de sensores se hizo uso de una resistencia variable (potenciómetro), como sensor principal. Además, se requirieron bandas elásticas que sujetaron ambas estructuras a los brazos, evitando cortar la circulación de sangre por estas extremidades.
El controlador seleccionado fue una tarjeta Arduino UNO, que se encargará de recibir la señal proveniente de la red de sensores, para posteriormente procesarla y enviar una señal de control a nuestro servomotor. Se debe destacar que, para procesar la señal recibida por los sensores, nos enfocamos en una programación basada en un control Proporcional, Integral y Derivativo (PID).
Después de construir las estructuras del exoesqueleto y la red de sensores, se continuó con el ensamble de ambos, teniendo como resultado los prototipos de la figura 2.
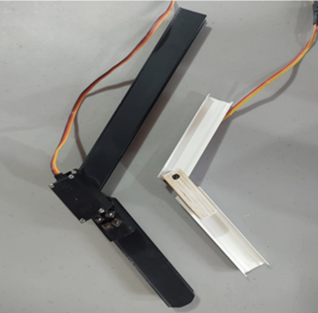
Figura 2: Prototipo de exoesqueleto y red de sensores
Una vez terminados los prototipos, se realizaron pruebas iniciales, sin acoplarlos al paciente e instructor, para determinar su correcto funcionamiento. Posterior a esto se planteó una rutina de ejercicios, dirigida a la articulación del codo, para esta vez realizar las pruebas con los prototipos acoplados, basándonos en las instrucciones propuestas por la fisioterapeuta. Dicha rutina consta de los siguientes pasos:
De esta manera se observó el funcionamiento general de cada uno de los prototipos, además de recabar datos de los movimientos realizados por el instructor y los replicados por el paciente.
Después de realizar las pruebas pertinentes del funcionamiento de los prototipos, se registraron los datos de las posiciones del antebrazo respecto al brazo, desde su posición extendida hasta los 90 grados, dicho traslado se representa en la gráfica de la figura 3.
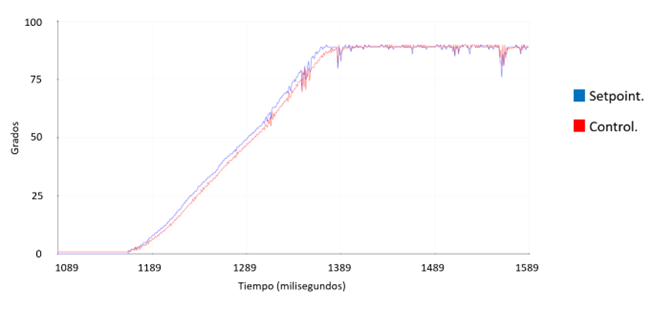
Figura 3: Representación del traslado del antebrazo respecto al brazo, desde su posición extendida hasta los 90 grados
Como se observa en la figura 3, la señal de control sigue el setpoint con precisión, sin embargo, debido a limitaciones con el hardware, la señal setpoint, tiene ruido y esto repercute en el control. Al ser un sensor resistivo (potenciómetro), se intentó reducir en la medida de lo posible el ruido de la señal, mediante las ganancias del controlador. Las ganancias del controlador Proporcional, Integral y Derivativo (PID) son la razón de que las señales no se superpongan.
En la gráfica de la Figura 4, se representa el traslado del antebrazo respecto al brazo, desde la posición de 90 grados hasta la extensión total de la articulación.
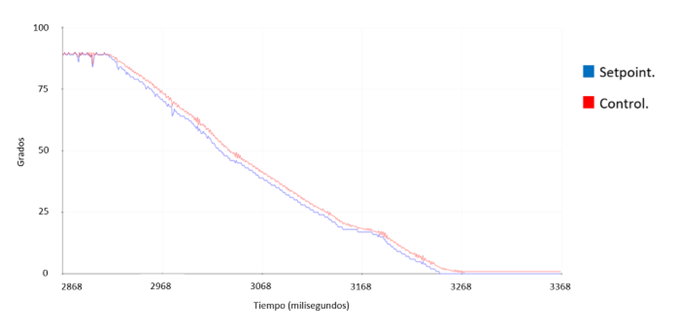
Figura 4: Representación del traslado del antebrazo respecto al brazo, desde la posición de 90 grados hasta la extensión total de la articulación
En la figura 4 observamos que el comportamiento de las señales en el traslado de 90 grados a 0 es similar a la figura 3. Es posible visualizar como el control suaviza la señal que el sensor envía como setpoint. Hacemos notar que el control no llega a 0 dejando un rango mínimo, para evitar una sobre extensión en los brazos de pacientes.
Se puede observar que el exoesqueleto principal acoplado en el paciente, que se muestra en la figura 5, replicó de manera consistente las rutinas indicadas por la fisioterapeuta, sin grandes inconvenientes. Teniendo como resultado una posible reducción de los fallos asociados a replicaciones erróneas, de los ejercicios propuestos por el profesional, derivadas de impresiones por parte del paciente. Debido a que los pacientes no pueden verificar con exactitud los ángulos, ni tiempos, de las flexiones y extensiones indicadas por el fisioterapeuta.

Figura 5: Exoesqueleto principal que replica movimientos basándose en una red de sensores
De esta manera se corrobora que la red de sensores, que se muestra en la figura 6, acoplada en el instructor, fue capaz de registrar los movimientos de la articulación del codo, de manera eficiente. Esto debido principalmente a los métodos de programación, los cuales suplen un déficit en cuanto a hardware. Esta programación la basamos en aplicar un control Proporcional, Integral y Derivativo (PID) a nuestros prototipos, con el fin de hacer más exacta la replicación de los movimientos realizados por el fisioterapeuta.

Figura 6: Red de sensores que captan el movimiento de la articulación del codo
En conclusión, después de realizar cada una de las pruebas con ambos prototipos, podemos argumentar que, en caso de una lesión en la articulación del codo, esta puede ser atendida con esta tecnología, que asiste en el tratamiento de rehabilitación.
También se logró comprobar que los diseños de las estructuras de los prototipos son las adecuadas para algunos de los ejercicios solicitados en los tratamientos de rehabilitación. Sin embargo, con ello no se busca desplazar al profesional, sino que el trabajo que este realice sea más fácil de llevar a cabo.
Además, se debe resaltar que el exoesqueleto no mostró fallas considerables al momento de replicar los movimientos, ni correcciones bruscas, debido al tipo de control que se implementó, por lo tanto, la integridad del paciente estuvo a salvo en todo momento. Pero debemos recordar que no fue completamente preciso, esto debido al ruido generado por el sensor resistivo y que perturbaba las señales que controlaban al exoesqueleto principal.