
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 6, 2024
El creciente interés en el desarrollo e implementación de Interfaces Cerebro Computadora (ICC) ha generado una amplia gama de contribuciones en forma de herramientas y metodologías destinadas a mejorar estos sistemas. Este esfuerzo conjunto ha permitido avanzar en la comprensión y aplicación de la comunicación entre humanos y máquinas. Este trabajo presenta una metodología de clasificación basada en el modelo de red neuronal convolucional EEGNET, validada fuera de línea. Utilizando datos de electroencefalograma (EEG) del paradigma de Imágenes Motoras (MI) de cuatro clases, de la BCI Competition 2008 2A, las señales EEG se emplean para generar comandos que controlan un robot móvil holonómico de tres ruedas.
Palabras claves: Interfaz Cerebro Computadora, Robot Móvil, Validación Fuera de Línea.
The growing interest in the development and implementation of Brain Computer Interfaces (BCIs) has generated a wide range of contributions in the form of tools and methodologies aimed at improving these systems. This joint effort has advanced the understanding and application of human-machine communication. This work presents a classification methodology based on the EEGNET convolutional neural network model, validated offline. Using electroencephalogram (EEG) data from the four-class Motor Imagery (MI) paradigm of the BCI Competition 2008 2A, the EEG signals are used to generate commands that control a three-wheeled holonomic mobile robot.
Key words: Brain Computer Interface, Mobile Robot, Offline Validation
Una Interfaz Cerebro Computadora (ICC) es un conjunto de herramientas y dispositivos que permiten transformar la actividad neuronal específica en comandos de instrucción para agentes externos, facilitando así la interacción directa entre el cerebro y un dispositivo. La base principal de esta tecnología es el análisis de la actividad cerebral, principalmente a través de electroencefalogramas (EEG), con el objetivo de identificar las ondas cerebrales asociadas a alguna actividad específica.
El EEG permite el registro de la actividad neuronal en tiempo real, esta técnica explora la funcionalidad del sistema nervioso central. Las neuronas constituyen un pequeño dipolo eléctrico con polaridad variable en función de que el impulso a la célula sea inhibitorio o excitatorio [1]. Estas señales se procesan y analizan para identificar patrones que correspondan a intenciones o pensamientos específicos del usuario.
En la literatura es común encontrar paradigmas relacionados, siendo los principales, aquellos asociados al movimiento imaginado de extremidades como brazos y pies, también denominados imágenes motoras. Estos paradigmas buscan identificar el momento en que el usuario realiza la tarea mental asociada, permitiendo así la traducción de estas señales en comandos para controlar dispositivos externos. Estudios realizados por Alonso-Valerdi et al. [2] proporcionan información complementaria sobre los diversos paradigmas asociados a esta tecnología.
De igual forma, el constante avance en la investigación de las ICC ha permitido el desarrollo de diversas aplicaciones. Por ejemplo: en el ámbito clínico, se ha explorado la viabilidad de dirigir prótesis empleando ICC [3], esto ha abierto nuevas posibilidades para pacientes con discapacidades motoras, ofreciéndoles una mayor autonomía y calidad de vida. Diversos estudios han explorado la efectividad de las imágenes motoras en ICC para el control de dispositivos que permiten mejorar la recuperación funcional y la independencia en individuos con deficiencias motoras. Neethu et al. [4] revisa los avances en tecnología de ICC y robótica, destacando su aplicación en la rehabilitación.
El objetivo de este trabajo es proponer una metodología para el desarrollo de una ICC, empleando el paradigma de imágenes motoras para el control de un robot móvil holonómico. Este enfoque no solo demuestra la capacidad de las ICC para interpretar y ejecutar comandos basados en la actividad cerebral, sino que también resalta el potencial de estas interfaces para aplicaciones prácticas en robótica y automatización. La metodología propuesta incorpora el control de movimiento de un robot holonómico, respondiendo a la necesidad de lograr un desplazamiento natural, tal como fue identificado por Masayoshi en 2007 [5].
Una ICC generalmente consta de cuatro etapas: adquisición de datos, procesamiento digital, control de la aplicación y retroalimentación del sistema. Sin embargo, cuando se trata de una interfaz cerebro computadora fuera de línea, las etapas se centran en áreas específicas de investigación o desarrollo. Estudiar una ICC fuera de línea permite evaluar los algoritmos desarrollados sin la necesidad de utilizar los recursos que requeriría una ICC completamente integrada. En este trabajo, se abordan principalmente dos etapas: procesamiento digital y control de la aplicación. Cabe destacar que, para la etapa de adquisición de datos, se empleará un conjunto de datos de libre acceso de sujetos realizando tareas mentales.
2.1 Conjunto de Datos
El conjunto de datos empleado fue recuperado de la IV Competencia de ICC 2008 – 2A [6], proporcionado por la Universidad Tecnológica de Graz (Australia) y de libre acceso. Este conjunto incluye registros de electroencefalograma (EEG) de 9 usuarios asociados al paradigma de imágenes motoras de 4 clases (movimiento del brazo derecho, izquierdo, pies y lengua). La captura del EEG se realizó con 22 electrodos de AG/AGCL en montaje monopolar, a una frecuencia de muestreo de 250 Hz. Además del registro de EEG, se capturó un registro de electrooculografía (EOG), sin embargo, este no fue empleado en este trabajo.
El protocolo de registro de los entrenamientos de los usuarios comenzaba con una señal sonora en el segundo 0. Durante los siguientes 2 segundos, se mostraba una cruz en una pantalla negra. Luego, durante aproximadamente 1.25 segundos, la pantalla mostraba una flecha indicando la tarea a realizar: flecha izquierda para el movimiento del brazo izquierdo, flecha derecha para el movimiento del brazo derecho, flecha hacia arriba para el movimiento de la lengua y flecha hacia abajo para el movimiento de los pies. Durante este tiempo, el sujeto solo debía reconocer la indicación. Finalmente, del segundo 3.25 al segundo 6, el sujeto realizaba la actividad correspondiente a la tarea indicada (movimiento real o movimiento imaginado). En la Figura 1 se muestra el esquema temporal del protocolo.
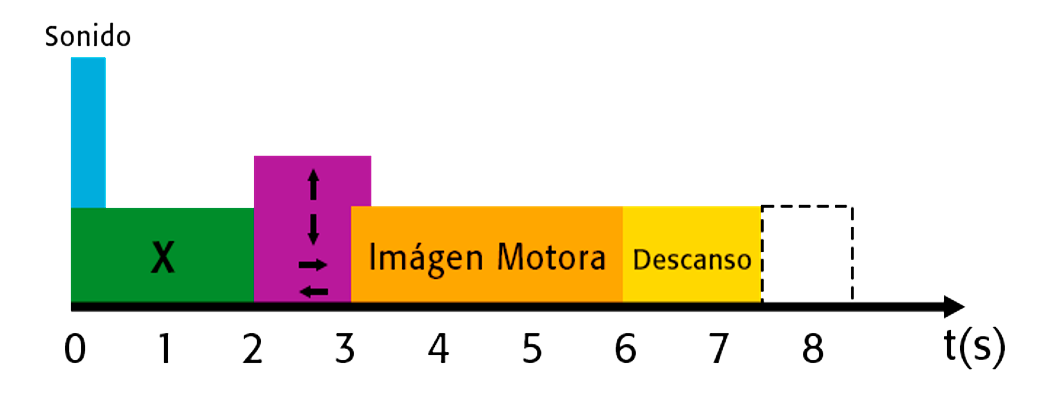
Figura 1. Esquema de tiempo del conjunto de datos empleado
El enfoque más común para usar señales EEG como entradas a los modelos de clasificación es representar la señal como una matriz, donde cada fila representa un punto de tiempo de un solo canal de EEG y cada columna representa la señal de diferentes canales. Para estructurar estos datos, es necesario preprocesar la información del conjunto de datos. En este estudio, se decidió utilizar doce electrodos (véase Figura 2), basándose en el estudio realizado en [7], donde se comprobó, a través de un algoritmo de selección, que los electrodos cercanos a C3 y C4 son más efectivos para la caracterización de la desincronización (ERD) y sincronización (ERS) relacionada con eventos, siendo efectivos en el paradigma de imágenes motoras [8].
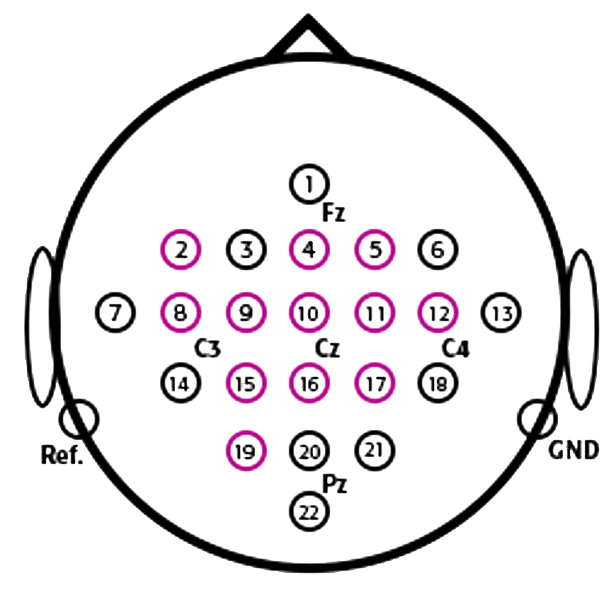
Figura 1. Esquema de tiempo del conjunto de datos empleado
Se aplicó un filtrado pasabanda para obtener las ondas de frecuencia alfa (8-13 Hz) y beta (13-30 Hz), donde suelen observarse los ERD y ERS [7], fenómenos asociados a las imágenes motoras. Posteriormente, se definió emplear un espacio de tiempo específico, con la finalidad de procesar la información más relevante. Por ello, se seleccionó el intervalo de tiempo del segundo dos al segundo seis, como se muestra en el esquema de tiempo de la Figura 1. Este intervalo incluye desde el momento de la instrucción en pantalla hasta la finalización de la tarea asociada, obteniendo así una representación estructurada de las señales de EEG para su clasificación.
2.2 EEGNET
EEGNet [9] es una arquitectura de red neuronal convolucional (CNN) compacta, diseñada para clasificar señales de EEG asociadas a paradigmas de imágenes motoras, entre otros. Se propuso su uso debido a su capacidad para ser entrenada con una cantidad limitada de datos. Los datos de entrada del modelo tienen la forma (C, T), donde C es la cantidad de canales y T son los puntos de muestreo de cada canal.
El procesamiento comienza con dos capas de convolución (Conv2D) con un tamaño de núcleo (K1, 1), diseñadas para capturar patrones temporales en cada electrodo. Luego, se emplea una capa de convolución profunda (DepthwiseConv2D) con un tamaño de núcleo (1, E) para extraer características espaciales. Finalmente, se utiliza SeparableConv2D con un tamaño de núcleo (K2, 1) para obtener información temporal más compleja de todos los electrodos [10].
En la literatura es posible encontrar resultados de la precisión en la clasificación de cuatro de conjuntos de datos diversos empleando este modelo, en la Tabla 1 se pueden hallar estos valores de comparación.
Tabla 1. Valores de precisión de clasificación de cuatro clases con la arquitectura EEGNet
| Autores | Conjunto de datos | Precisión |
|---|---|---|
| Rao Y. et al. [11] | Propios | 72.91 % |
| M. Liu et al. [12] | BCI Competition IV 2A [6] | 54.50 % |
| Mincheng Wang [13] | BCI Competition IV 1 [6] | 63.59 % |
2.3 Sistema de Robot Móvil
El tipo de robot móvil empleado en este trabajo es un robot móvil holonómico, que se caracteriza porque su número de grados de libertad es igual al número de coordenadas necesarias para describir su configuración [14]. Para controlar el movimiento, se implementó un control cinemático que considera la geometría del robot y estudia su posición, velocidad y aceleración [15].
En la Figura 3 se muestra el modelo esquemático en el marco de referencia global Xw y Yw. En la Ecuación 1 se representa el modelo, donde R=0.1m es la distancia del centro del robot a cada rueda, r=0.03 es el radio de cada rueda, y ∂a=60°, ∂b=180°y ∂c=300° son los ángulos de distribución de cada eje de rueda respecto al eje Xw.
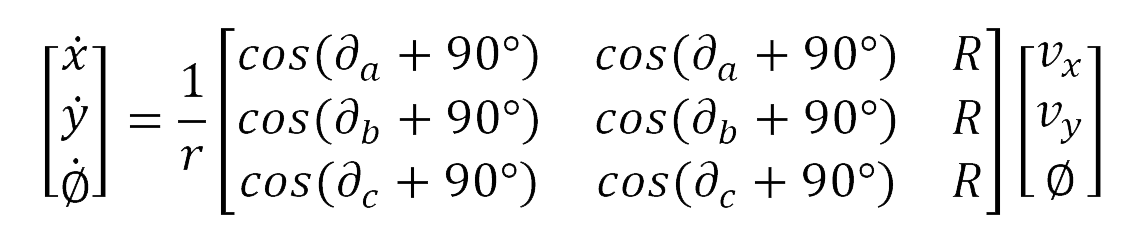
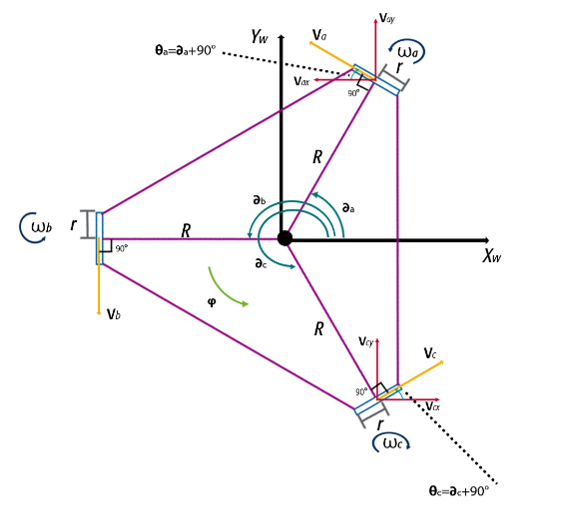
Figura 3. Esquema geométrico de la cinemática del robot móvil
2.4 Configuración Experimental
El modelo experimental propuesto consta de tres módulos, Figura 4. El primer módulo es la fase de entrenamiento, que consiste en el preprocesamiento del conjunto de datos asociados a imágenes motoras. Este proceso permite estructurar la información necesaria para entrenar el modelo de clasificación. El segundo módulo se enfoca en la clasificación fuera de línea, utilizando el modelo de clasificación previamente entrenado. Los resultados de esta clasificación permiten asignar instrucciones al tercer módulo el cuál es el encargado del control del prototipo de robot móvil. Este módulo ejecuta movimientos predefinidos asociados a cada una de las cuatro clasificaciones: el movimiento imaginado de la mano derecha se asocia con el movimiento en el eje X-; el movimiento imaginado de la mano izquierda, con el eje X+; el movimiento imaginado de la lengua, con el eje Y+; y el movimiento imaginado de los pies, con el eje Y-.
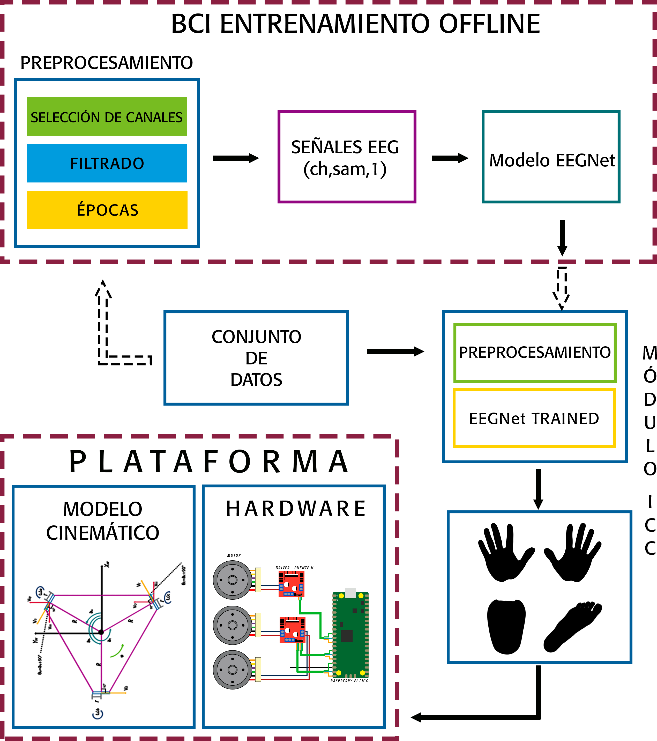
Figura 4. Configuración experimental
Los resultados del modelo de clasificación se presentan en la Figura 5, donde se obtuvo una precisión del 61.59% en el entrenamiento con datos de 9 sujetos. Para este proceso, se utilizó el 80% de los datos disponibles para el entrenamiento y el 20% para la validación. Los parámetros específicos del modelo fueron: K1=8, K2=16 y E=12. Esta precisión refleja la capacidad del modelo para clasificar correctamente las señales de EEG asociadas a las imágenes motoras, demostrando su eficacia en un contexto de datos limitados.
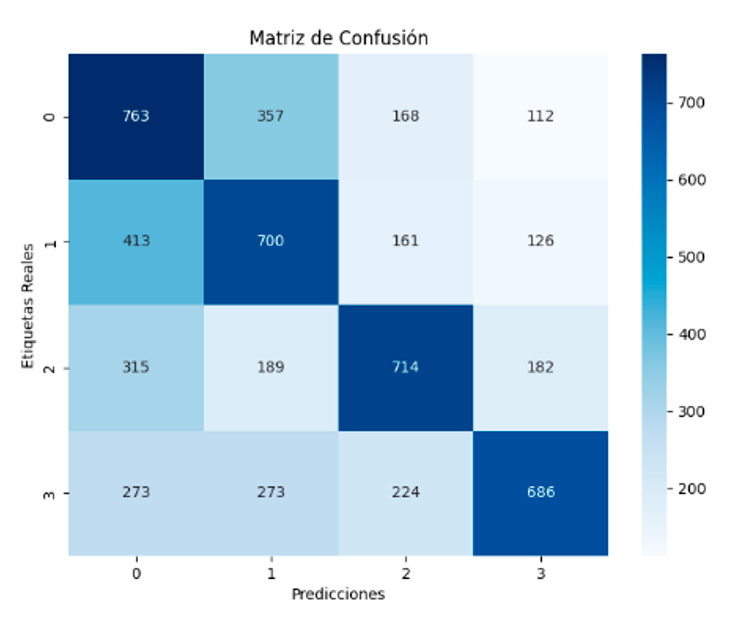
Figura 5. Matriz de confusión del modelo de clasificación
En cuanto a la funcionalidad del modelo cinemático, se validó en Matlab como se muestra en la Figura 6. Las pruebas incluyeron movimientos a una velocidad de 1 m/s en el eje X y en el eje Y. Los resultados confirman que el modelo puede controlar el robot móvil holonómico de manera efectiva, respondiendo correctamente a las instrucciones de movimiento.
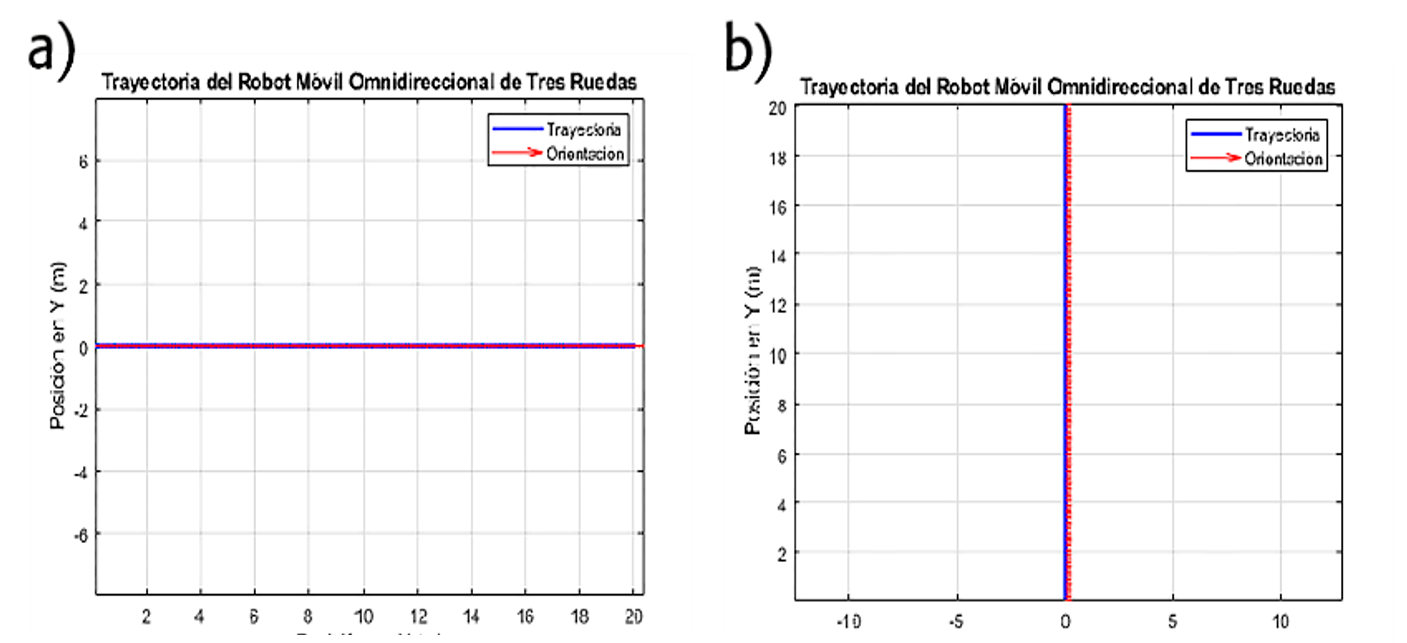
Figura 6. Evaluación del modelo cinemático para el movimiento sobre a) eje x; y, b) eje y
La integración entre el avance tecnológico y la comprensión del cerebro es esencial para mejorar las Interfaces Cerebro Computadora (ICC), beneficiando a la sociedad. Este trabajo presenta una propuesta de metodología de clasificación basada en EEGNET, validada fuera de línea, utilizando datos de EEG del paradigma de imágenes motoras. La precisión del 61.59% indica una capacidad aceptable del modelo para interpretar correctamente las intenciones del usuario a partir de la actividad cerebral. Esta precisión sugiere que el modelo es competente en clasificar las señales EEG en un entorno controlado, proporcionando una base sólida para futuras mejoras y optimizaciones. Los resultados confirman que el modelo puede controlar el robot móvil holonómico de manera efectiva, respondiendo correctamente a las instrucciones de movimiento. La validación de este control en un entorno fuera de línea asegura que el modelo tiene el potencial de ser utilizado en aplicaciones prácticas, sin necesidad de una integración inmediata y costosa en un sistema en línea. Sin embargo, dado que estos sistemas deben operar de manera confiable, es crucial robustecer el robot para abordar necesidades como la evasión de obstáculos y la prevención de colisiones, lo que garantizaría la alineación de las intenciones del usuario con su entorno. Como propuesta para trabajos futuros, se sugiere agregar esta capa de robustez para permitir el funcionamiento en ambientes no controlados.