
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 2, 2019
Se plantea el diseño y construcción de un prototipo rehabilitador para aquellas personas que sufren de fracturas en las falanges de las manos, haciendo énfasis en la ergonomía, fácil manejo y que sea económicamente accesible.
El prototipo está conformado de 5 servomotores colocados por debajo de una estructura sujeta y adaptada en el antebrazo para sostener este, y así evitar cansancio durante la terapia, dejando libres los dedos de las manos para que sea cómodo y no cause dolor, cada servomotor está unido a una estructura mecánica adaptada a cada dedo, lo que permite realizar movimientos de extensión y flexión de estos. Se tendrá rehabilitación en los tres grados de libertad de cada dedo, esto con ayuda de los servomotores que rotaran de acuerdo con una intensidad y distancia diferente dependiendo el caso o gravedad de la lesión.
Palabras clave: Rehabilitación, Fracturas, Falanges
The design and construction of a rehabilitation prototype for people suffering from fractures in the phalanges of the hands, emphasizing ergonomics, easy handling and that is economically accessible, is considered.
The prototype is made up of 5 servomotors placed below a fixed structure and adapted in the forearm to support this, and thus avoid fatigue during theraphy, leaving the fingers free to be comfortable and not cause pain, each servomotor is attached to a mechanical structure adapted to each finger, which allows movements of extensión adn flexion of the same. Rehabilitation will be done in the three degrees of freedom of each finger, this with the help of servomotors that will rotate according to a different intensity and distance depending on the case or severity of the injury.
Keywords: Rehabilitation, Fractures, Phalanges
Los desgarros musculares suponen más del 30% de todas las lesiones. El desgarro muscular, también conocido como rotura muscular, es la ruptura total o parcial de fibras musculares, lo que genera un dolor local muy intenso, inflamación y dificultad para mover la zona afectada. [3]
El proceso de rehabilitación para lesiones en las falanges de las manos es importante para la recuperación de la movilidad, pero en ocasiones las personas lo consideran bastante desgastante por diferentes situaciones, como la incomodidad de las terapias de rehabilitación, el costo y el dolor que puede estar causando al paciente durante estas. Estos motivos son los que hacen que las personas abandonen las terapias de rehabilitación. [3]
2.1 Arquitectura de la mano
El esqueleto óseo de la mano consiste en 8 huesos carpianos divididos en dos filas: la fila proximal articulada con las porciones distales del radio y el cúbito, a excepción del pisiforme que se encuentra en disposición palmar y se articula con el triquetrum; los cuatros huesos carpales distales están articulados con los cinco metacarpianos. Los 8 huesos carpales interpuestos entre el antebrazo y los huesos metacarpianos forman la compleja articulación de la muñeca, como se muestra en la figura 2.1. [2]
Las unidades adaptativas de la mano que se mueven alrededor de la unidad central son tres elementos que en orden de importancia constituyen: el rayo del pulgar, el rayo del índice y la unión del tercero, cuarto, y quinto rayos juntos con el cuarto y el quinto metacarpianos. [2]
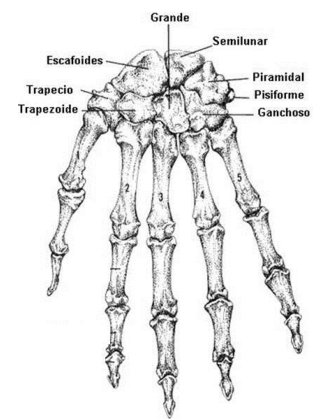
Figura 2.1 Estructura Completa de los Huesos de la Mano
2.2 Fracturas de falanges
Son bastante frecuentes y se suelen asociar a las fracturas de los metacarpianos. Es importante conocer la deformidad típica que se produce tras la fractura y que dependen de su localización. [4]
Dentro de las fracturas de la muñeca y mano encontramos
Fracturas de la extremidad distal del radio
Este tipo de fracturas puede dar:
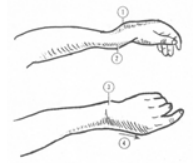
Figura 2.2. Fracturas de Separación o Rotura en Huesos de la Mano
Fracturas y luxaciones carpianas
Dentro de este apartado podemos encontrar:
En la figura 2.2.1 Se Observa La Estructura Completa de los Carpos.
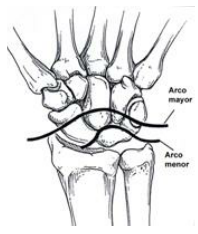
Figura 2.2.1 Estructura de los Carpos
La construcción del prototipo se llevó a cabo en tres etapas, las cuales en conjunto conforman el rehabilitador para las falanges de las manos.
3.1 Implementación del sistema mecánico
Se construyo el mecanismo que dará el movimiento a las falanges de las manos individualmente, esto mediante el uso de 5 servomotores que están especificados para girar de acuerdo con las necesidades del proceso de rehabilitación o terapia, así mismo los movimientos de estos pueden ser alternados y/o en conjunto, además de que se puede manipular la velocidad de giro y las repeticiones de los movimientos.
En la figura 3.1 se muestra la colocación de los servomotores en el rehabilitador.

Figura 3.1 Servomotores del Prototipo De Rehabilitador
3.2 Diseño y construcción de la base que sujeta el antebrazo
En esta etapa se procedió a la construcción de una base que sujeta el antebrazo durante las terapias de rehabilitación, esto con el propósito de evitar fatiga en el mismo antebrazo del paciente, quedando expuestas solamente las falanges para que tengan un libre movimiento.
El material que se utilizó para su construcción fue a base de esponja y un recubrimiento de tela tipo piel, para que este sea ergonómico.
El diseño se muestra a continuación en la figura 3.2.

Figura 3.2 Base Que Sujeta El Antebrazo
3.3 Construcción de la estructura elástica que sujeta las falanges
Para el desarrollo de esta estructura se tomó en cuenta, que fuera cómoda, pero a la vez resistente, además de esto que se acoplara a los movimientos realizados por los servomotores, ya que estas dos partes del prototipo están unidas, y son las que originan los movimientos de extensión y flexión de las falanges.
En la figura 3.3 se muestra el diseño de esta estructura.

Figura 3.3 Estructura Elástica Para Las Falanges
3.4 Prototipo rehabilitador de falanges
Al concluir con el desarrollo de las tres etapas anteriores, y conjuntándolas se obtuvo el prototipo deseado, el cual se muestra en la figura 3.4.

Figura 3.4 Prototipo Final Del Rehabilitador
El proceso de rehabilitación en general resulta ser poco agradable para los pacientes debido a que experimentan dolor y fatiga durante este, por lo que en muchas ocasiones se opta por abandonar las terapias.
pero con el desarrollo de este prototipo se pretende atacar estos aspectos de manera que, se pueda favorecer a los pacientes, ya que este se enfoca en realizar la rehabilitación de una manera memos dolorosa gracias a la estructura elástica y ajustable que tiene, que a comparación de otros dispositivos en donde sus diseños son rígidos, por otra parte los movimientos que se realizan con el paciente pueden variar en cuanto a intensidad y repeticiones de los movimientos, por lo cual se da un amplio margen de atención al tipo y gravedad de la lesión que se presente.
Así este prototipo pretende mejorar los procesos de rehabilitación específicamente en lesiones de las falanges de las manos.